Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
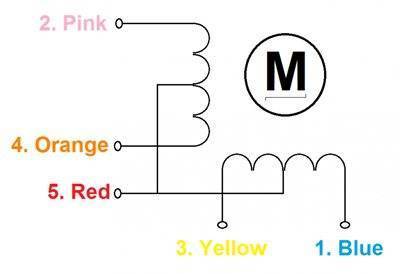 Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
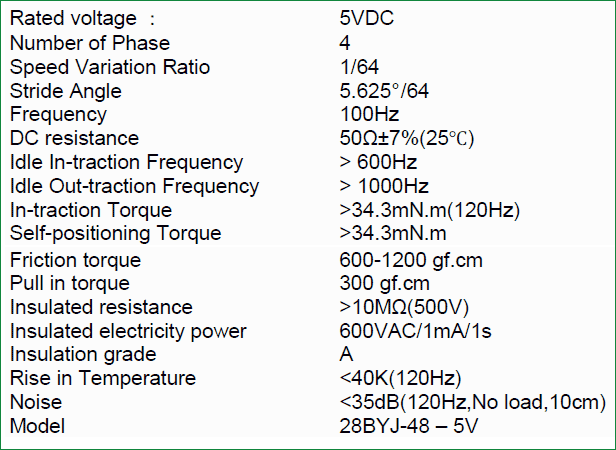
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
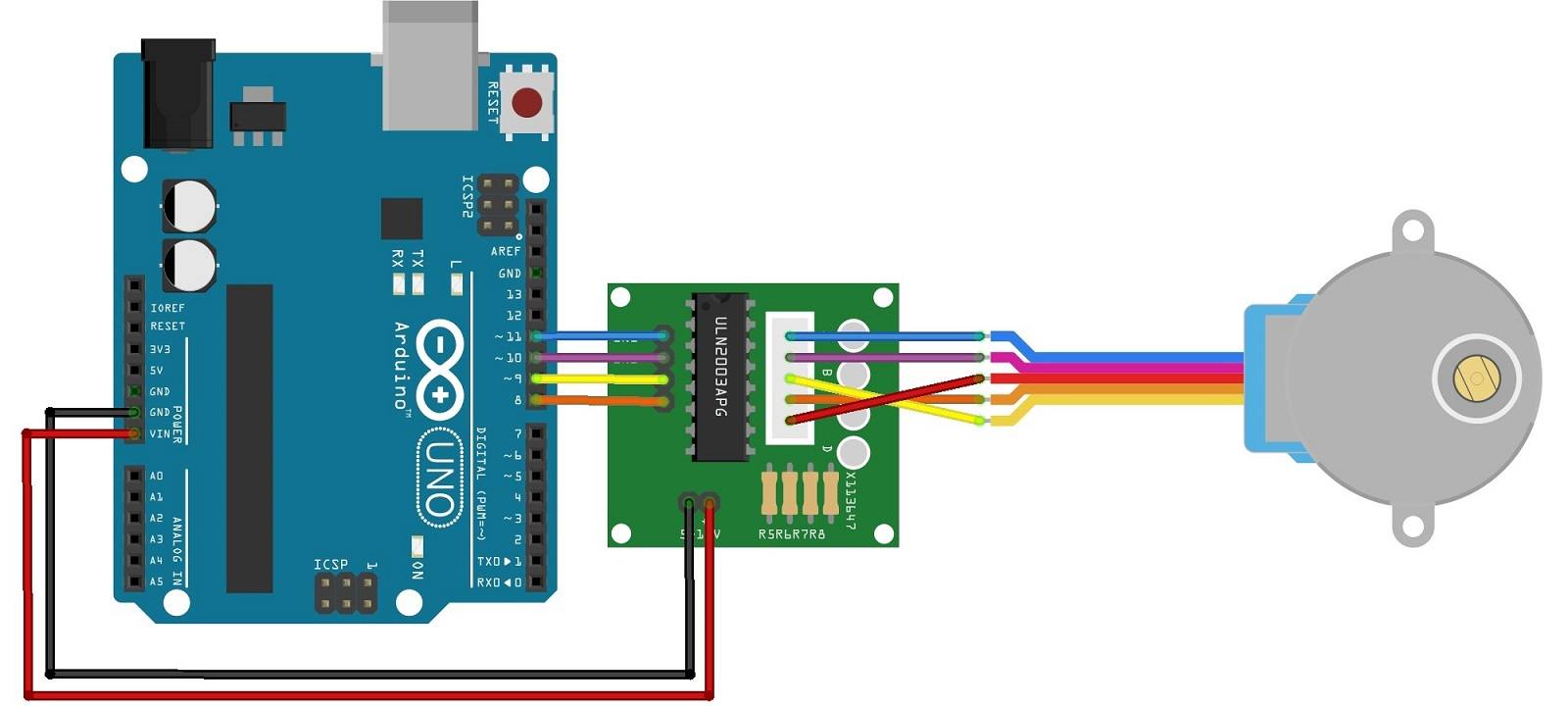
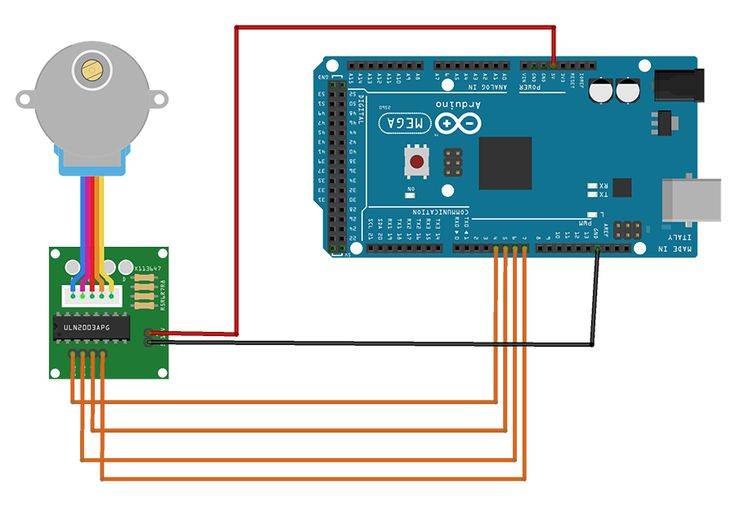
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Выходной драйвер ULN2003 для микроконтроллеров. Описание, подключение, datasheet на русском
ULN2003 — это универсальная интегральная микросхема, состоящая из 7 идентичных и независимых драйверов, которые позволяют управлять с помощью микроконтроллера реле, небольшим двигателем постоянного тока, шаговым двигателем, низковольтными лампами или светодиодной лентой.
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Каждый драйвер состоит из двух транзисторов подключенных в конфигурации Дарлингтона. Пара Дарлингтона, разработанная Сидни Дарлингтоном в 1953 году, состоит в каскадом соединении двух биполярных транзисторов, в результате чего получается очень высокий коэффициент усиления, равный произведению коэффициента усиления каждого из двух транзисторов. Благодаря этому мы можем управлять нагрузками определенной мощности с очень малыми входными токами.
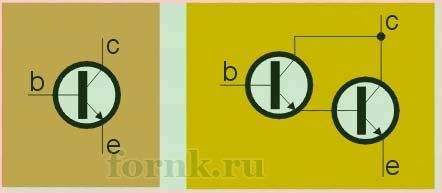
Пара Дарлингтона не свободна от некоторых недостатков, которые мы рассмотрим далее. Транзистор NPN универсального назначения открывается, когда мы подаем на его базу напряжение около 0,6 В. Если мы используем небольшой ток, мы можем довести его до насыщения с очень низким напряжением коллектор-эмиттер (VCE), например, в случае BC337, это между 0,2 В и 0,5 В.
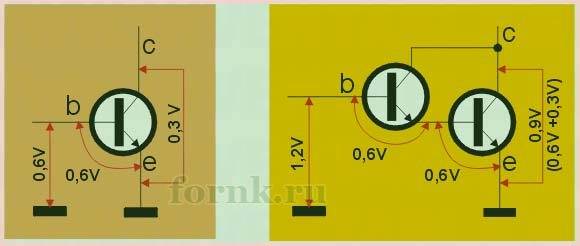
В паре Дарлингтона входное напряжение будет в два раза больше, чем 0,6 В, потому что базовые напряжения обоих транзисторов складываются, как мы это можем видеть на рисунке. Также падение напряжения на выходном транзисторе будет больше, потому что это будет сумма напряжения насыщения первого транзистора + напряжение база-эмиттер выходного транзистора.
В любом случае, эти недостатки не являются существенными, поскольку в целом выходы микроконтроллера составляют 3,3 В или 5 В, что значительно превышает порог срабатывания ULN2003.
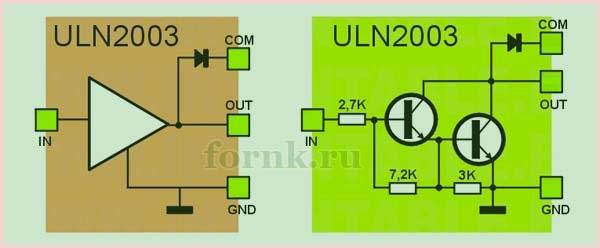
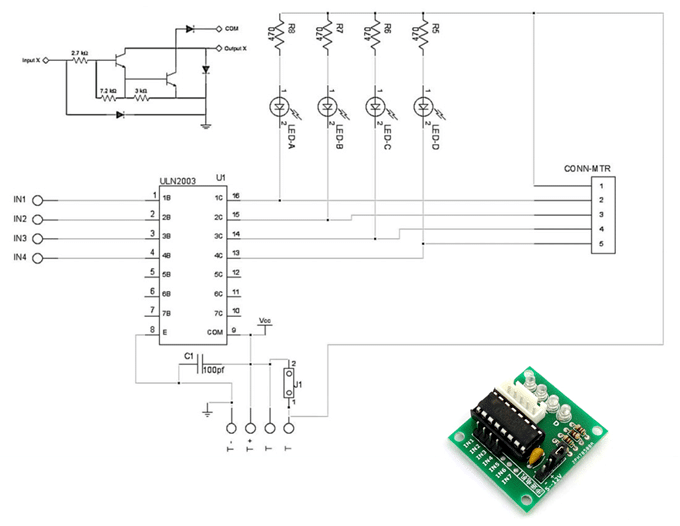
На предыдущем рисунке мы видим внутреннюю схему одного из каналов драйвера ULN2003. Здесь мы видим входной резистор на 2,7кОм, и еще два дополнительных резистора которые улучшают характеристики драйвера. Входное сопротивление каждого канала освобождает нас от установки внешних резисторов при подключении ULN2003 к микроконтроллеру.
Во внутренней схеме мы также можем видеть защитный диод, подключенный к коллектору выходного транзистора. Данный диод предназначен для защиты транзистора от ЭДС самоиндукции, возникающей в момент отключения индуктивной нагрузки (реле или двигателей). Чтобы этот диод работал, необходимо подключить вывод 9 (COM) к положительному выводу нагрузки (см. Рисунок с примером подключения).
Коэффициент усиления каждого драйвера больше 500, поэтому для получения максимального выходного тока достаточно на вход подать ток менее 1 мА.

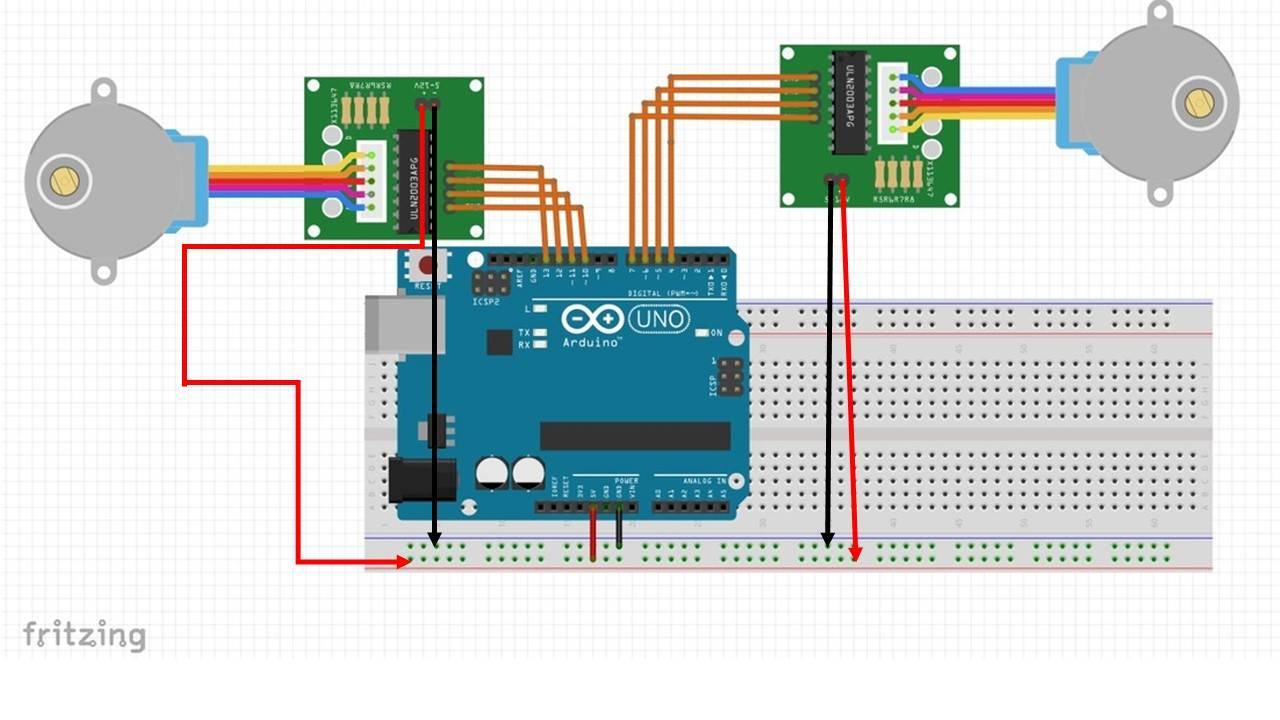
На рисунке мы видим ULN2003, подключенный к микроконтроллеру (это могут быть PIC, Atmel, Arduino, Raspberry PI) и с различными нагрузками (двигатели постоянного тока, светодиодная лента, реле и т. д.).
В верхней части примера (подключение двигателя) мы видим, что для получения большего выходного тока можно параллельно соединять более одного канала. Вывод (+ V) – это напряжение, необходимое для питания силовой части и не связано с питанием микроконтроллера. Необходимо только, чтобы масса их была общей.
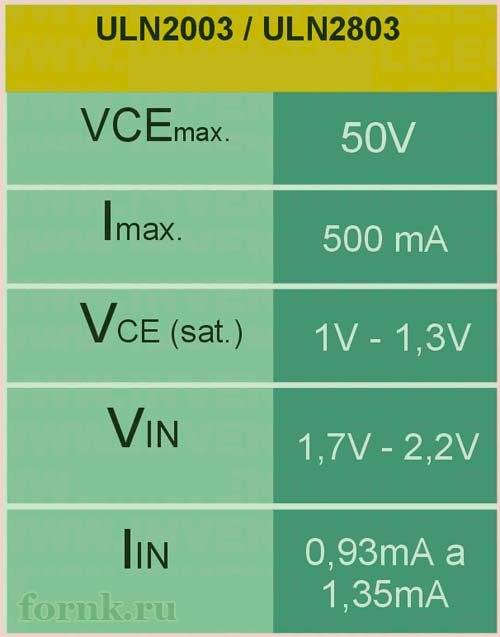
Микросхема ULN2003 является частью семейства подобных драйверов: ULN2001, ULN2002, ULN2003, ULN2004, которые очень похожи. Различие в первую очередь в значении входного сопротивления для согласования с различной логикой.
В настоящее время микросхема ULN2003 является наиболее популярной, поскольку она хорошо работает с управляющими напряжениями 5 В (TTL) и 3,3 В (LTTL). Существует вариант с 8 каналами вместо 7 – это ULN2803. Из-за восьмого канала корпус имеет 18 выводов. В остальном он подобен ULN2003.
(167,0 KiB, скачано: 662)
источник
Блок питания 0…30 В / 3A
Набор для сборки регулируемого блока питания…
Подробнее
Принцип работы шагового двигателя
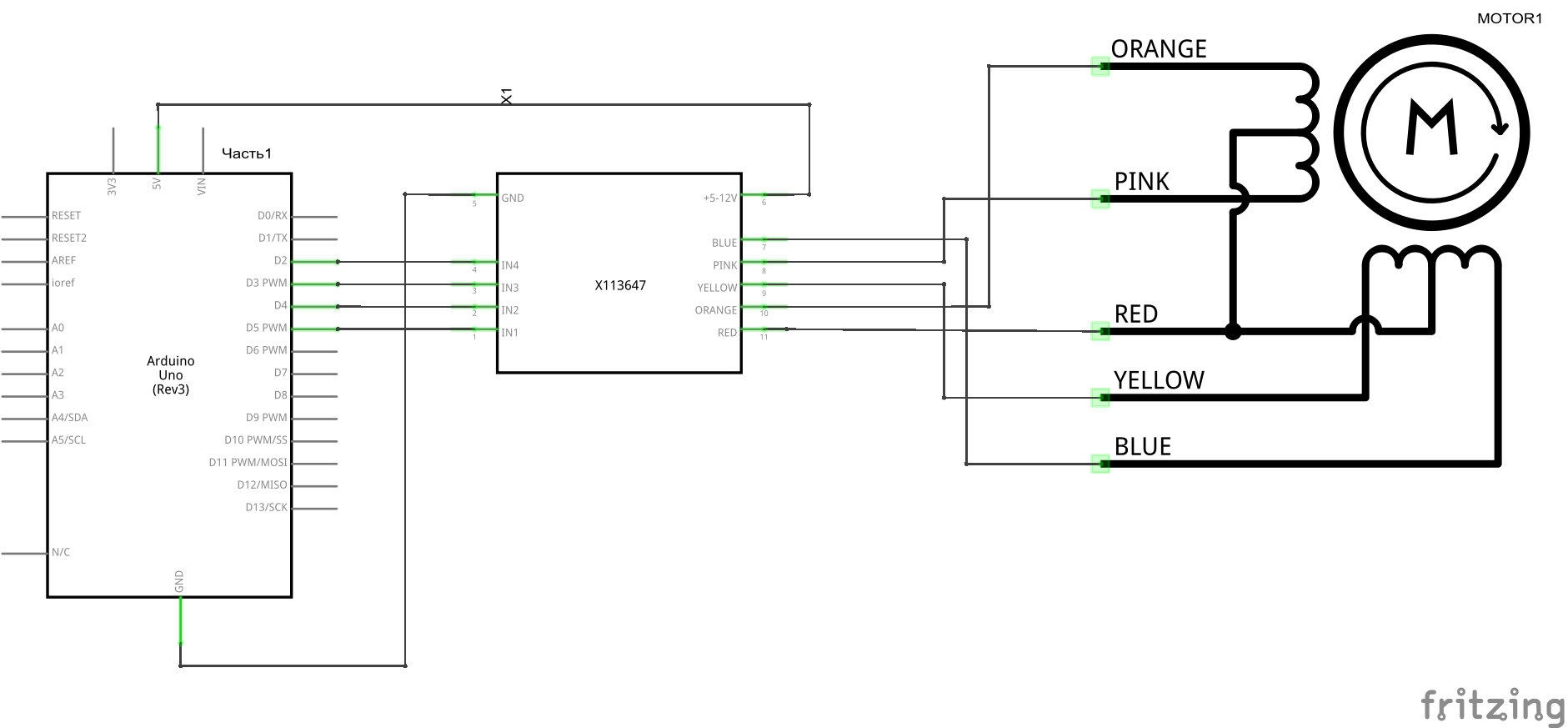
Рис. 1 – Схема шагового двигателя
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
Рис. 2 – Упрощенные анимированные схемы работы шагового двигателя
28BYJ-48 — это маленький, дешевый, 5 вольтовый шаговый мотор с редуктором. Передаточное число редуктора у него примерно 64:1, что позволяет получить вполне достойный крутящий момент для мотора такого размера и скорость порядка 15 об/мин. С некоторыми программными хитростями для постепенного ускорения можно достичь более 25 об/мин.

Рис. 3 – Шаговый двигатель 28YBJ-48
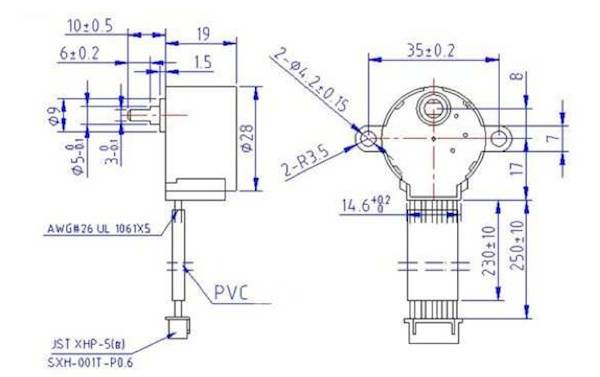
Рис. 4 – Размеры шагового двигателя 28BYJ-48
Таблица 1
| Тип мотора | Униполярный шаговый двигатель |
| Число фаз | 4 |
| Подключение | 5-выводов (к контроллеру двигателя) |
| Рабочее напряжение | 5-12 В |
| Частота | 100 Гц |
| Сопротивление по постоянному току | 50 Ом±7%(25°C) |
| Частота под нагрузкой | > 600 Гц |
| Частота на холостом ходу | > 1000 Гц |
| Крутящий момент | > 34.3 мН·м (120 Гц) |
| Момент самопозиционирования | > 34.3 мН·м |
| Стопорящий момент | 600-1200 г·см |
| Тяга | 300 г·см |
| Сопротивление изоляции | > 10 МОм (500 В) |
| Класс изоляции | A |
| Шум | < 35 дБ (120 Гц, без нагрузки, 10 см) |
| Режим шага | Рекомендован полушаговый режим (8-шаговая управляющая сигнальная последовательность) |
| Угол шага | Полушаговый режим: 8-шаговая управляющая сигнальная последовательность (рекомендовано). 5,625 градусов на шаг, 64 шага на оборот внутреннего вала мотора.Режим полного шага: 4-шаговая управляющая сигнальная последовательность. 11,25°/шаг, 32 шага на оборот внутреннего вала двигателя. |
| Передаточное отношение редуктора | 64:1 |
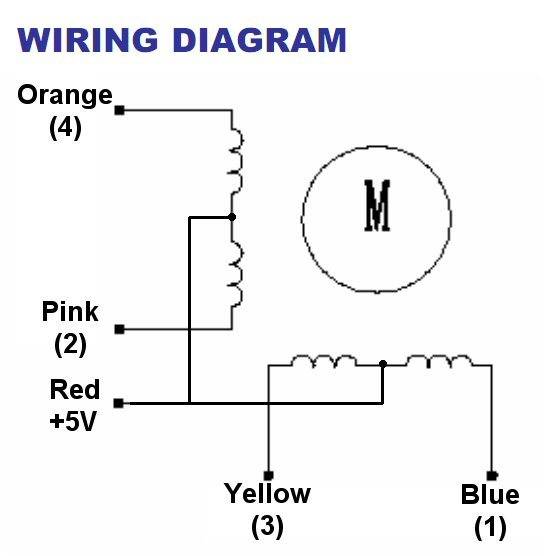
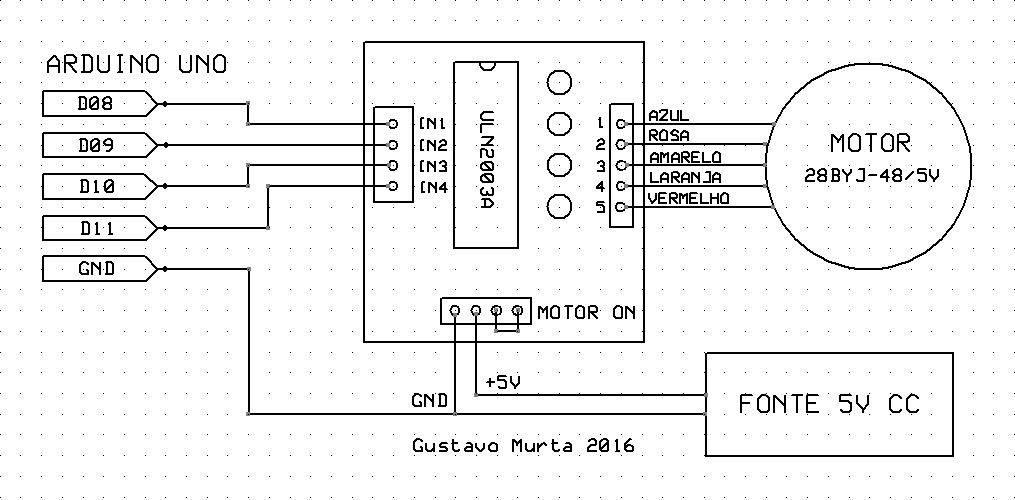
| Подключение к контроллеру ULN2003 | A (синий), B (розовый), C (желтый), D (Оранжевый), E (красный, средний вывод обмоток) |
| Вес | 30г |
Двигатель имеет четыре обмотки, которые запитываются последовательно, чтобы повернуть вал с магнитом.
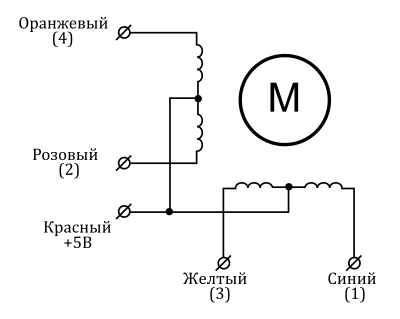
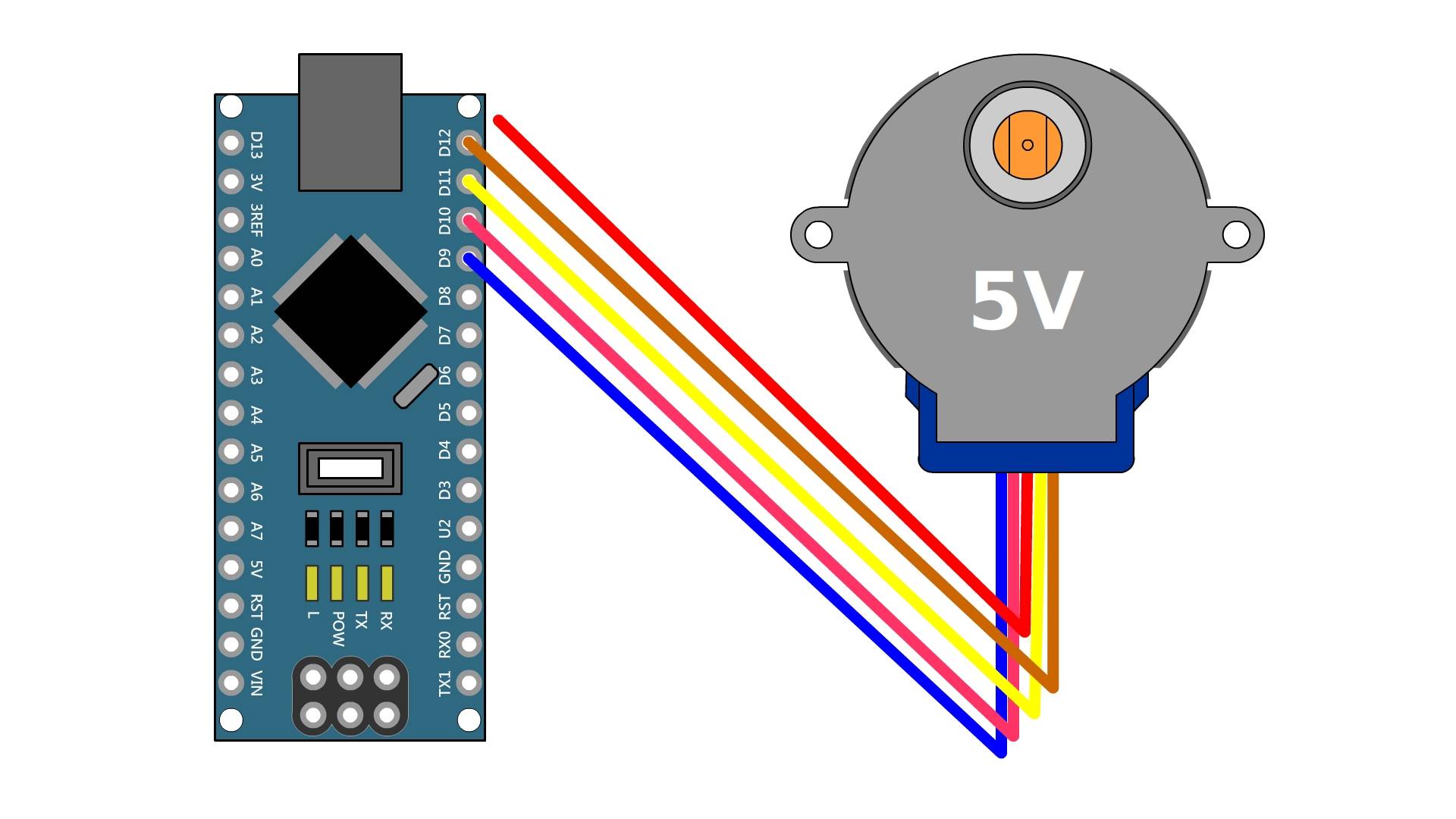
Рис. 5 – Подключение выводов шагового двигателя 28BYJ-48
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
- Полношаговый режим — за 1 такт, ротор делает 1 шаг.
- Полушаговый режим — за 1 такт, ротор делает 1/2 шага.
Когда используется полношаговый метод управления, две из четырех обмоток запитываются на каждом шаге. Идущая вместе с Arduino IDE библиотека Stepper использует такой способ.
Таблица 2
| Провод | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 4-Оранжевый | ||||
| 3-Желтый | ||||
| 2-Розовый | ||||
| 1-Синий |
Предпочтительным является использование метода полушага, при котором сначала запитывается только 1 обмотка, затем вместе первая и вторая обмотки, затем только вторая обмотка и так далее. С 4 обмотками это дает 8 различных сигналов, как показано в таблице 3.
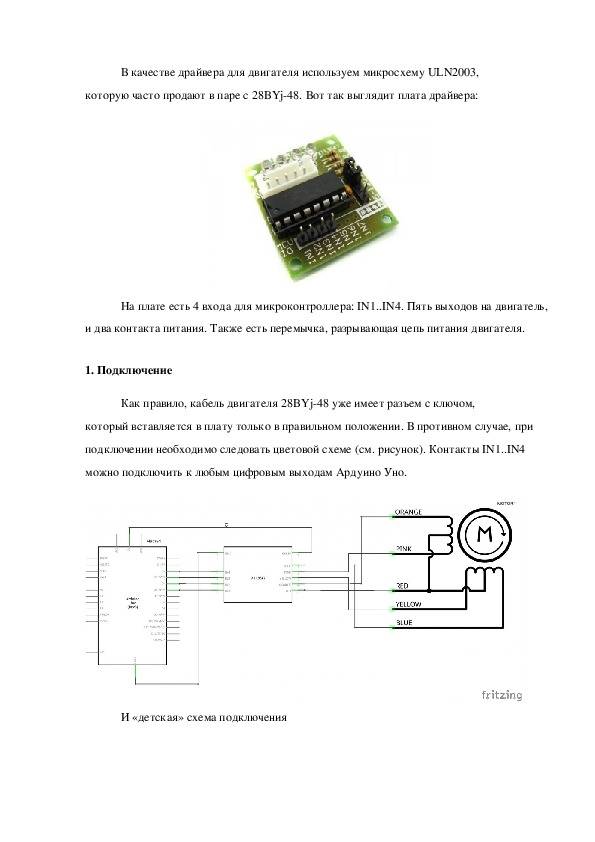
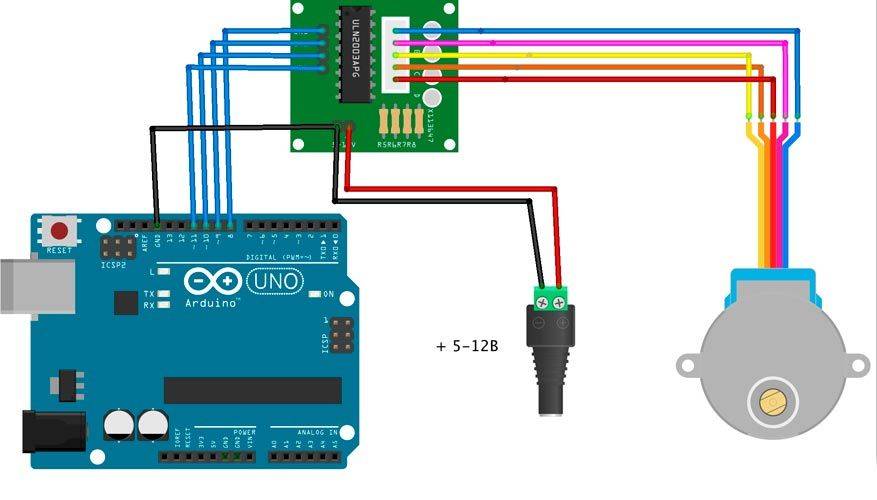
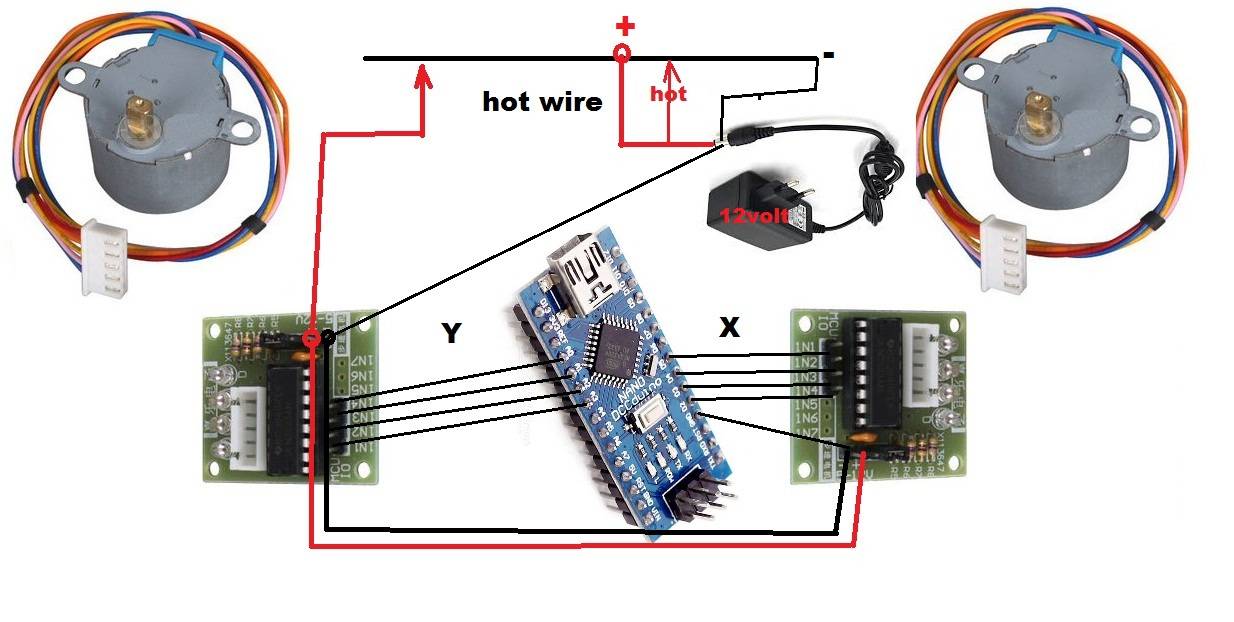
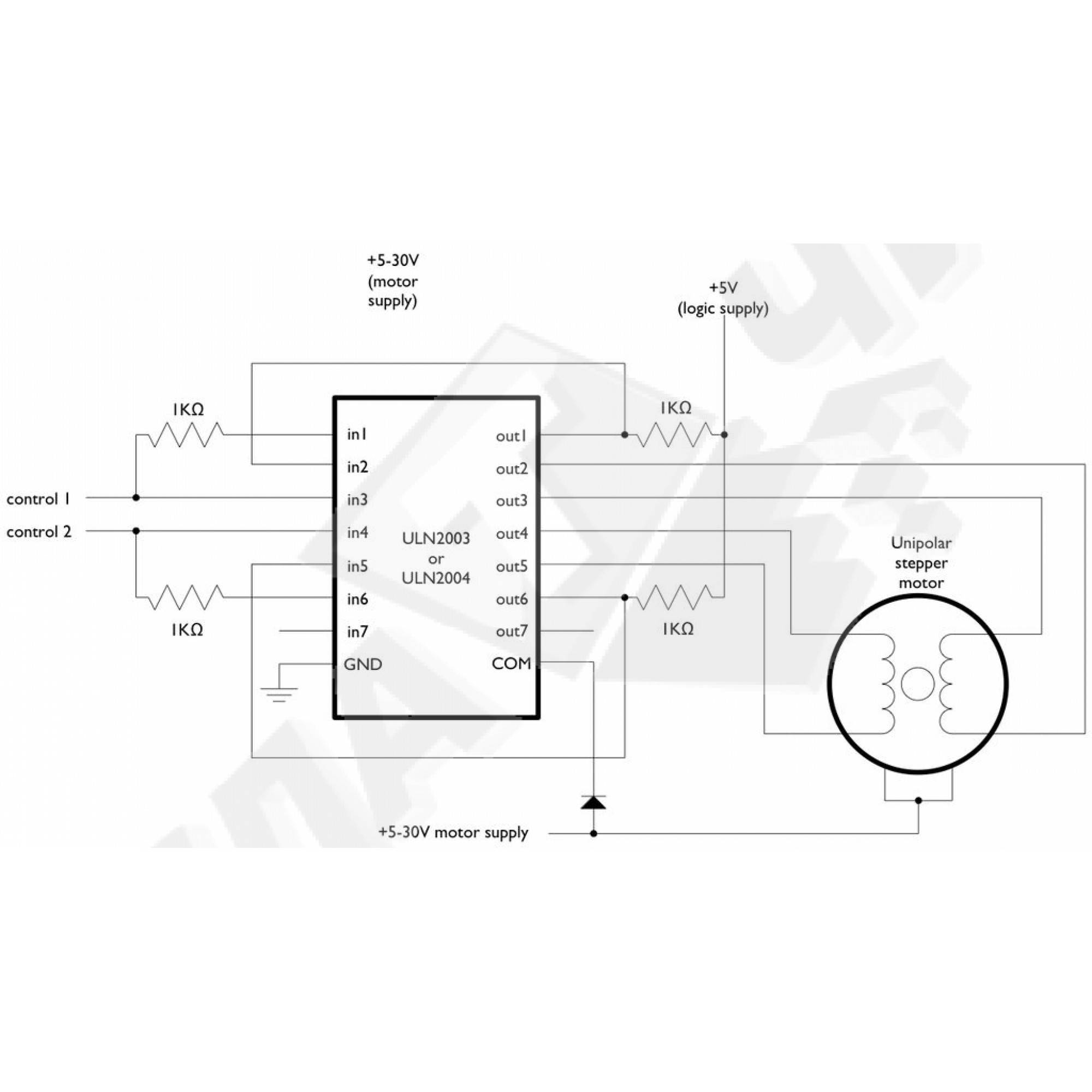
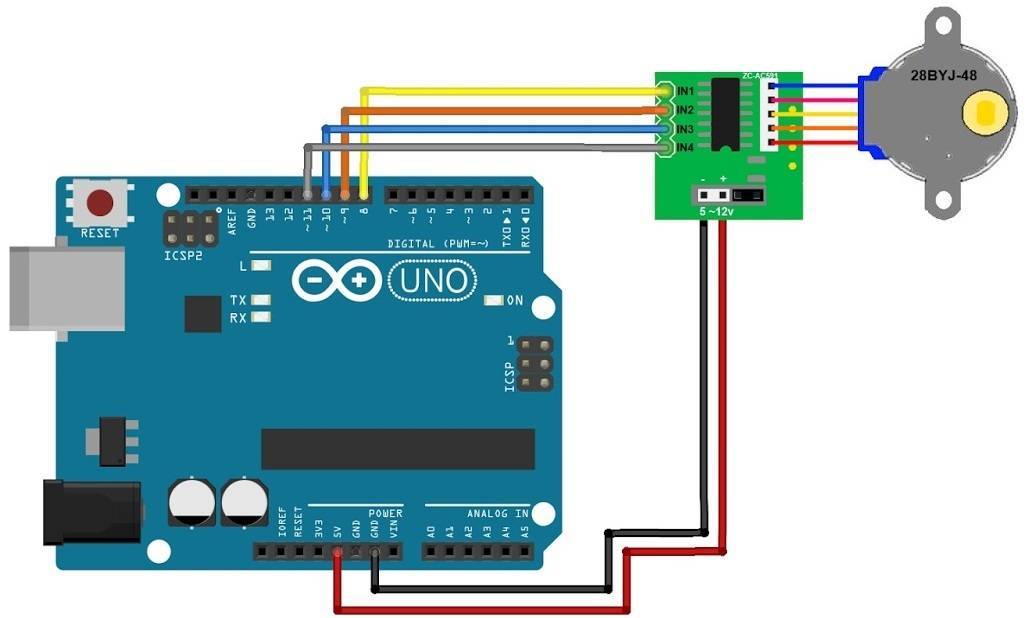
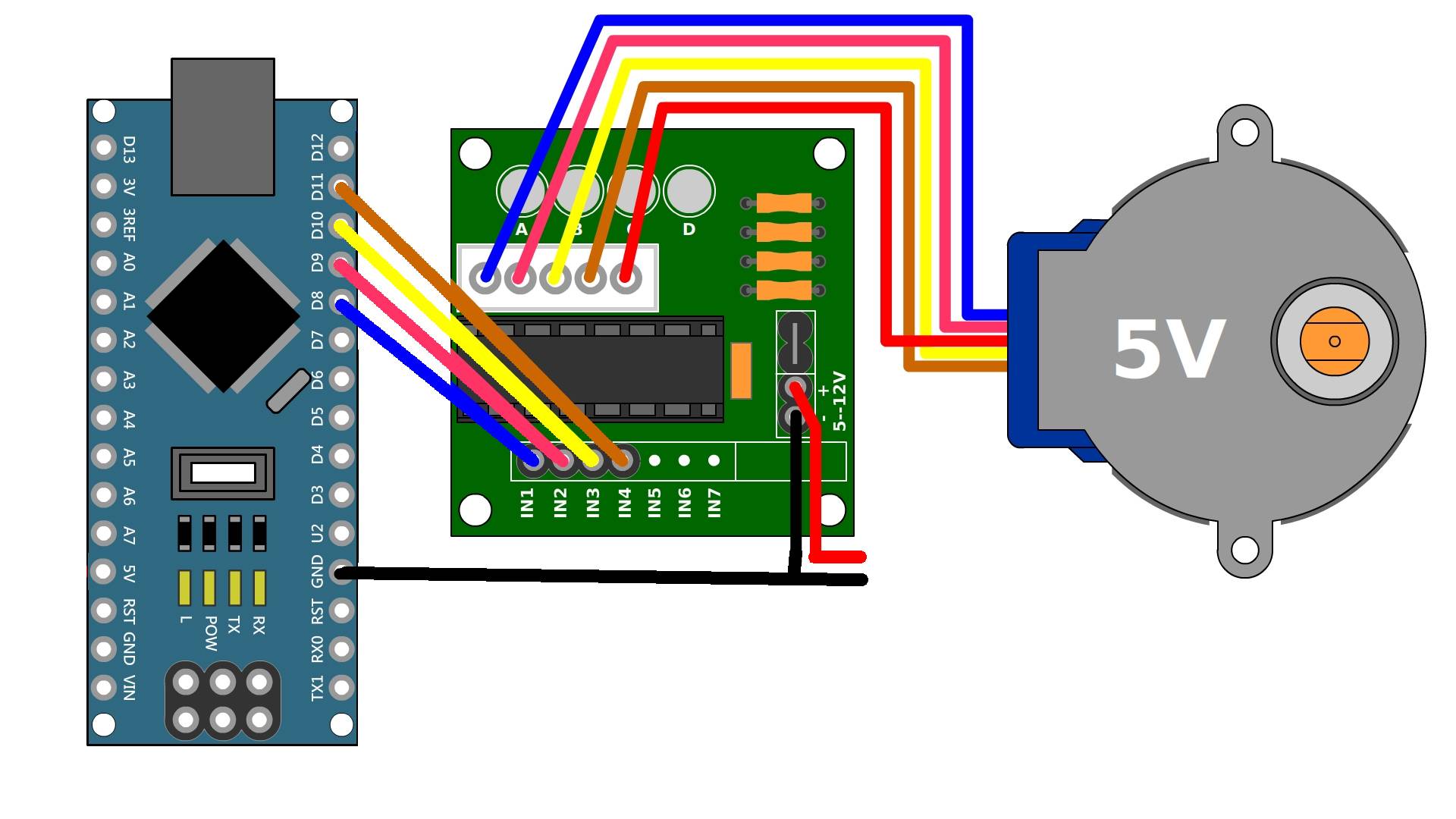
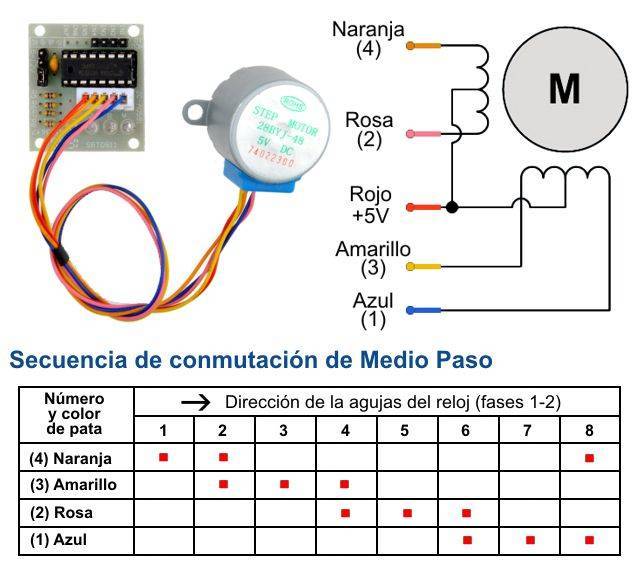
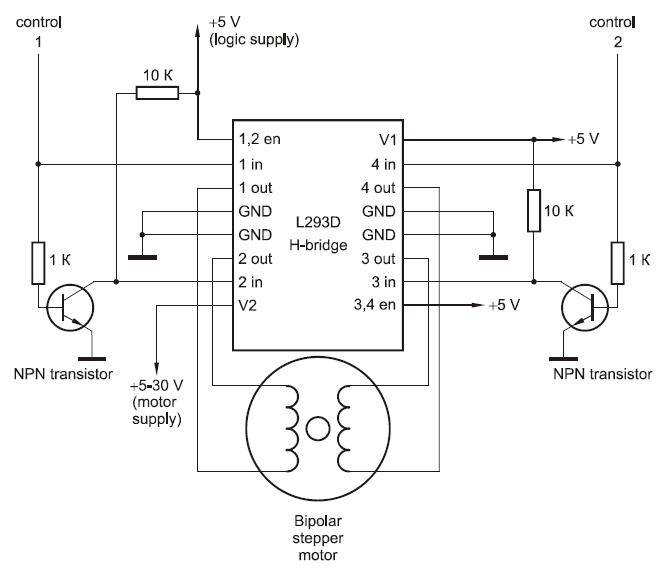
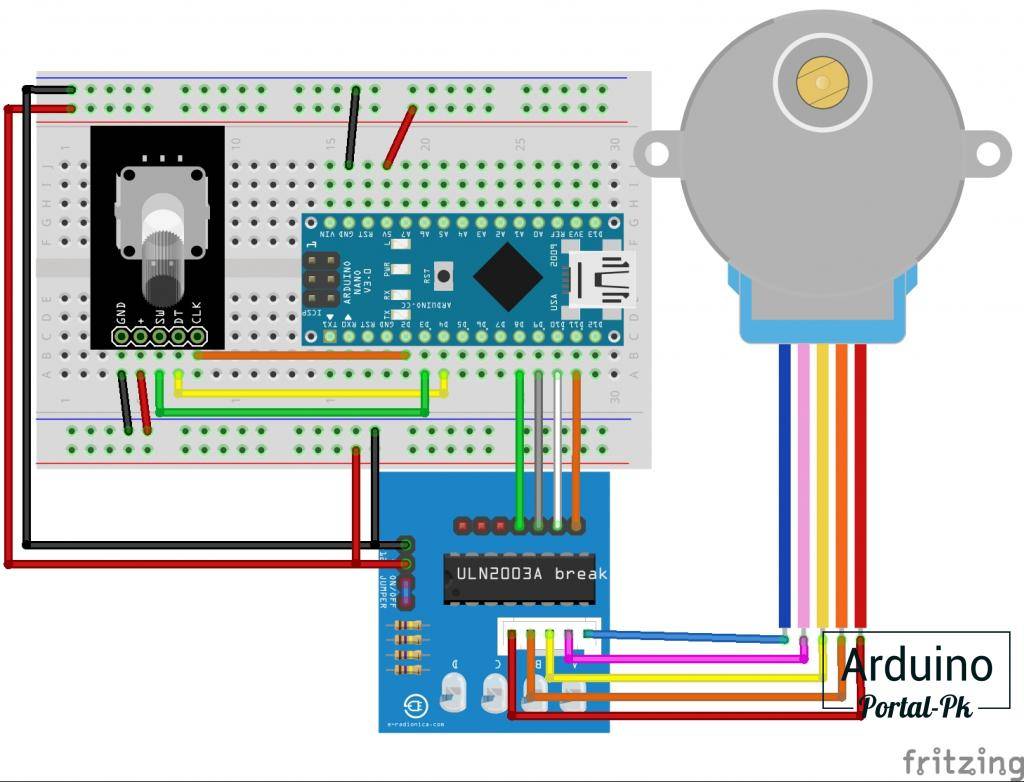
Таблица 3
| Провод | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| 4-Оранжевый | ||||||||
| 3-Желтый | ||||||||
| 2-Розовый | ||||||||
| 1-Синий |
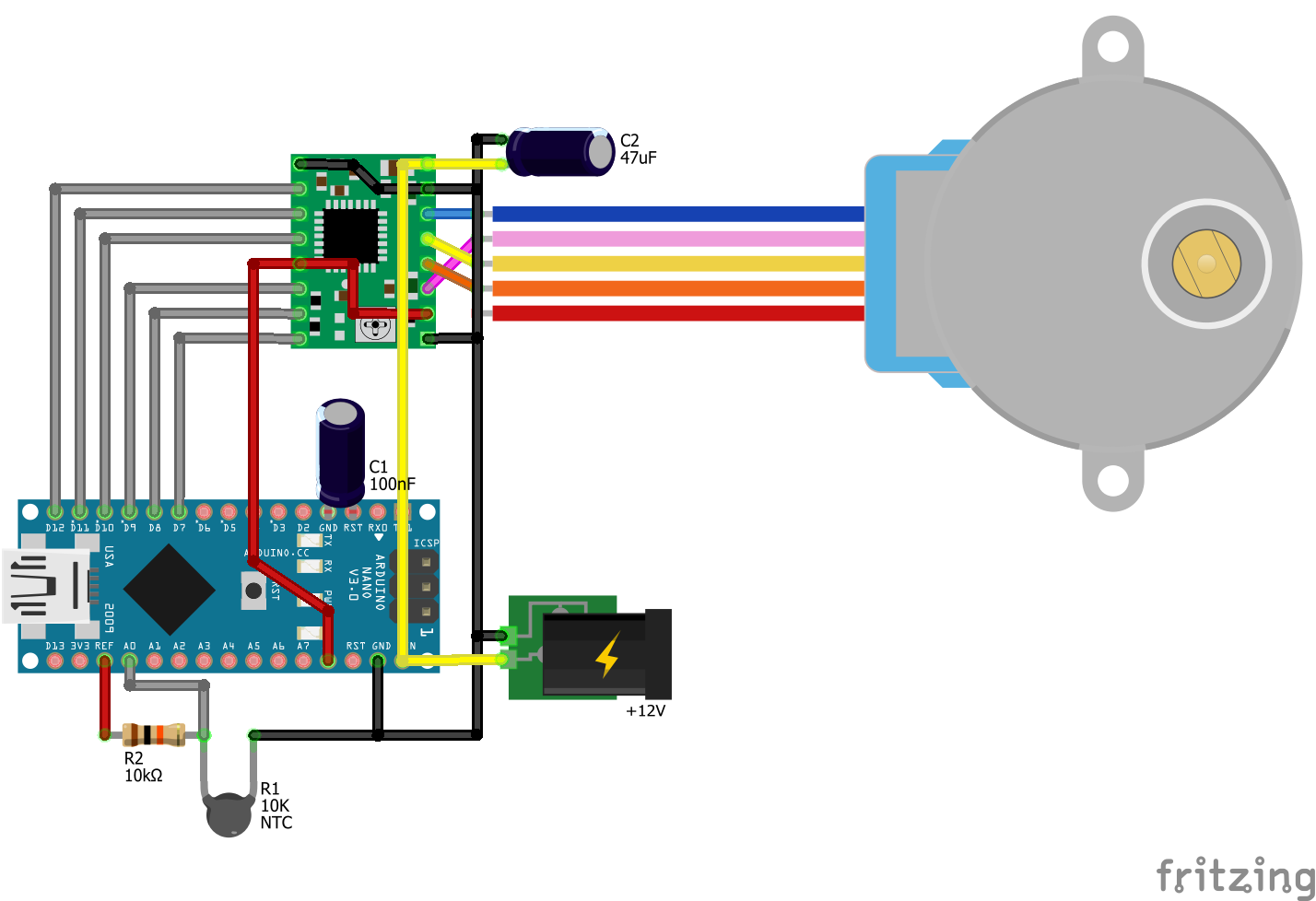
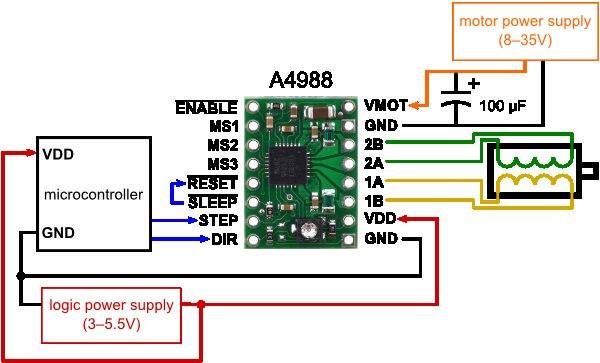
Распиновка драйвера A4988
Драйвер A4988 имеет всего 16 контактов, которые связывают его с внешним миром. Распиновка у A4988 следующая:
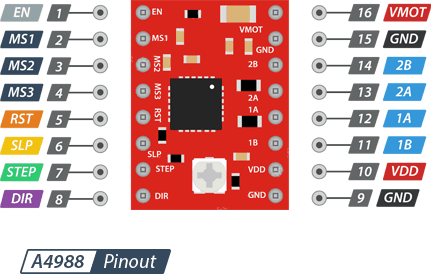
Давайте ознакомимся со всеми контактами по очереди.
Выводы питания
На самом деле A4988 требует подключения двух источников питания.
VDD и GND используется для управления внутренней логической схемой. Напряжение питания должно находиться в пределах от 3 до 5,5 В.
Vmot и GND для обеспечения питания шагового двигателя. Тут напряжение в пределах от 8 до 35 В.
Согласно datasheet, для питания двигателя требуется соответствующий разделительный конденсатор рядом с платой, способный выдерживать ток 4 А.
Выводы выбора микрошага
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пяти ступенчатых разрешений.

По умолчанию эти три контакта подтянуты к земле внутренним резисторам. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления
Драйвер A4988 имеет два управляющих входа, а именно: STEP и DIR.
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращается по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы управления питанием A4988
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать это для экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выводы для подключения шагового двигателя
Выходные контакты: 1B, 1A, 2A и 2B.
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
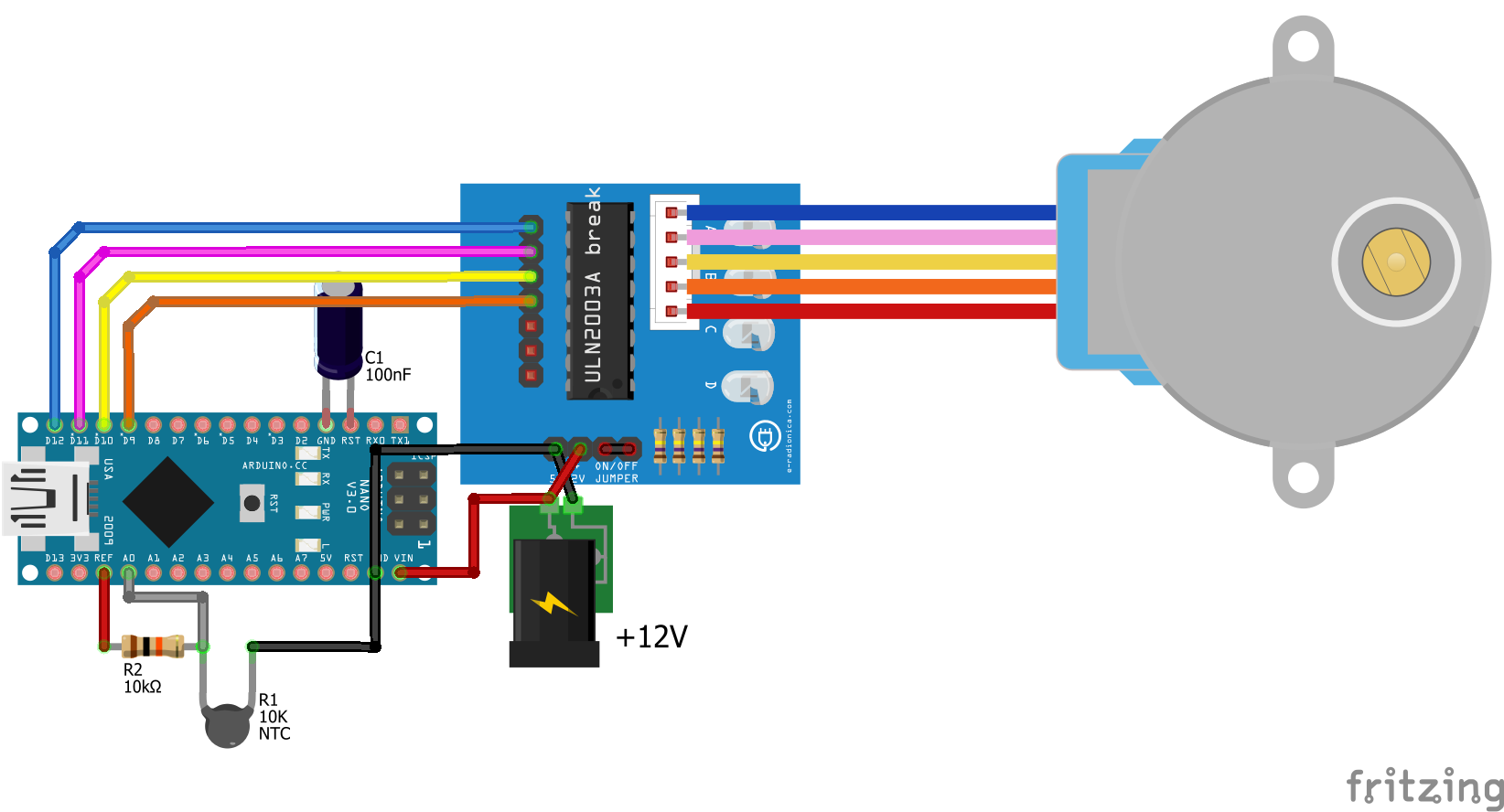
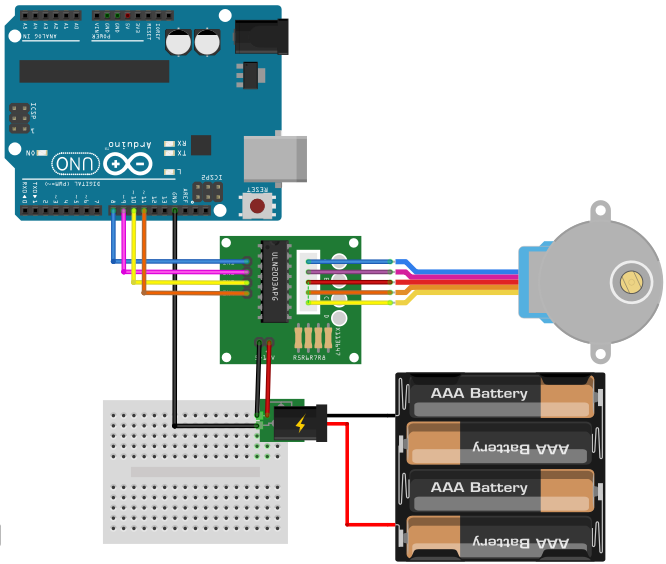
Схема подключения
На uln 2003 схема подключения до боли проста и не включает никаких компонентов. Главное, не перепутать вход с выходом и общий вывод, в остальном все и так ясно. Но все же для наглядности стоит повторить схему на примере с шаговым двигателем с питанием от 12 до 24 В. Общий провод от +24В подключается на 9 вывод и к центральному отводу обмоток двигателя, все остальные оп порядку согласно полюсам. Управление двигателем осуществляется по аналогичным линиям, только со входа МС.
При работе в таком режиме вероятность спалить выходной транзистор достаточно большая, потому что короткое замыкание в двигателе никто еще не отменял, точно также, как и клин ротора, из-за чего ток может существенно возрасти. Поэтому в каждую линию управления по выходу можно поставить шунт и обрисовать его схемой защиты от КЗ. Это зависит от конкретной задачи и типа устройства, в котором эта микросхема применяется.
Скетчи для управления шаговым двигателем
Простой Arduino-код для проверки шагового двигателя
//простое подключение A4988
//пины reset и sleep соединены вместе
//подключите VDD к пину 3.3 В или 5 В на Arduino
//подключите GND к Arduino GND (GND рядом с VDD)
//подключите 1A и 1B к 1 катушке шагового двигателя
//подключите 2A и 2B к 2 катушке шагового двигателя
//подключите VMOT к источнику питания (9В источник питания + term)
//подключите GRD к источнику питания (9В источник питания – term)
int stp = 13; //подключите 13 пин к step
int dir = 12; //подключите 12 пин к dir
pinMode(stp, OUTPUT);
pinMode(dir, OUTPUT);
if (a
digitalWrite(stp, HIGH);
digitalWrite(stp, LOW);
else { digitalWrite(dir, HIGH);
digitalWrite(stp, HIGH);
digitalWrite(stp, LOW);
if (a>400) // вращение на 200 шагов в направлении 2
digitalWrite(dir, LOW);
Второй код для Arduino для обеспечения плавного вращения двигателя. Используется библиотека AccelStepper library .
#include
AccelStepper Stepper1(1,13,12); //использует пин 12 и 13 для dir и step, 1 – режим “external driver” (A4988)
int dir = 1; //используется для смены направления
Stepper1.setMaxSpeed(3000); //устанавливаем максимальную скорость вращения ротора двигателя (шагов/секунду)
Stepper1.setAcceleration(13000); //устанавливаем ускорение (шагов/секунду^2)
if(Stepper1.distanceToGo()==0){ //проверка, отработал ли двигатель предыдущее движение
Stepper1.move(1600*dir); //устанавливает следующее перемещение на 1600 шагов (если dir равен -1 будет перемещаться -1600 -> противоположное направление)
dir = dir*(-1); //отрицательное значение dir, благодаря чему реализуется вращение в противоположном направлении
delay(1000); //задержка на 1 секунду
Stepper1.run(); //запуск шагового двигателя. Эта строка повторяется вновь и вновь для непрерывного вращения двигателя

Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
07 10.2016
На производстве иногда применяют станки ЧПУ (Числовое Программное Управление). Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя (ШД). Правда, связка — шаговый двигатель и Ардуино — это далеко не идеальный вариант (не для серьёзных объектов)
Но всё-таки призываю обратить внимание.
Из этой статьи вы узнаете:
Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости. Я снова на связи. С вами Гридин Семён. Сегодня мы рассмотрим интересную тему. Это соединение шагового двигателя с популярной электронной платой
Arduino.
Так что готовьте чай и читайте статью.
Управление шаговым двигателем CD-привода
Здравствуйте, есть вопрос к опытным ардуинщикам. Когда я начал осваивать ардуино, то сразу же приобрел для знакомства шаговый мотор с «драйвером» на ULN2003. Вопрос в том, можно ли подключить к биполярному шаговому двигателю из CD-привода ардуино через этот «драйвер»? Если да, то подскажите, пожалуйста, как.
Не выйдет на ULN2003, она умеет только ключами землю подавать униполярному (с общим соединением обмоток)
а у вас биполярник- две раздельные обмотки, нужен мост и защита от сквозных токов.
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Вы сравниваете биполярник и униполярный двигатель. На Вашем вращение осуществляется поочередной подачей +5 на каждую ногу, а в CD/DVD поочередно меняются +5 и GND
У меня биполярный. Supereplosive пишет, что у него тоже биполярный. Раскажите, пожалуйста, чем отличается “подача поочередно +5 на каждую ногу” и “поочередно менять +5 и GND”? Я так понимаю у меня тоже меняется +5 и GND?
А Вас не смутило, что в приведенном PDF схема имеет 4 контакта (как на биполярном движке), а рисунок моторчика 5 (как на 28byj-48)?
Разница в том, что по 4 проводам, в вашем случае, поступает +5 вольт, по очереди, а 5-й идет на землю. UNL2003 служит для того, чтобы превратить миллиамперы с вашей ардуины в амперы для вращения двигателя.
А вот для биполярного двигателя от CD/DVD нужен драйвер, который умеет как включать +5, так и землю.
Разница конкретно в следующем:
на 28byj-48 подаем на первый провод+5. потом на 2 и так по кругу.
на CD/DVD мы должны подать +5 на первый прово и GND на 2й. потом +5 на 3-й и GND на 4-й. Затем мы подаем GND на первый и +5 на второй. UNL2003 не может соединить с землей. Либо +5, либо ничего. Но не земля.
Прошу простить мою тупость, но прошу потратить пару минут и разъяснить.
В приведенном мной примере к БИПОЛЯРНОМУ двигателю 28byj-48 (я сделал вывод, что биполярный, так как на схеме приведенной в PDF нет связи между парами обмоток) подходит 5ть проводов. 5й провод передает на моторчик GND(имхо). Какая разница с БИПОЛЯРНЫМ двигателем из CD-DVD?
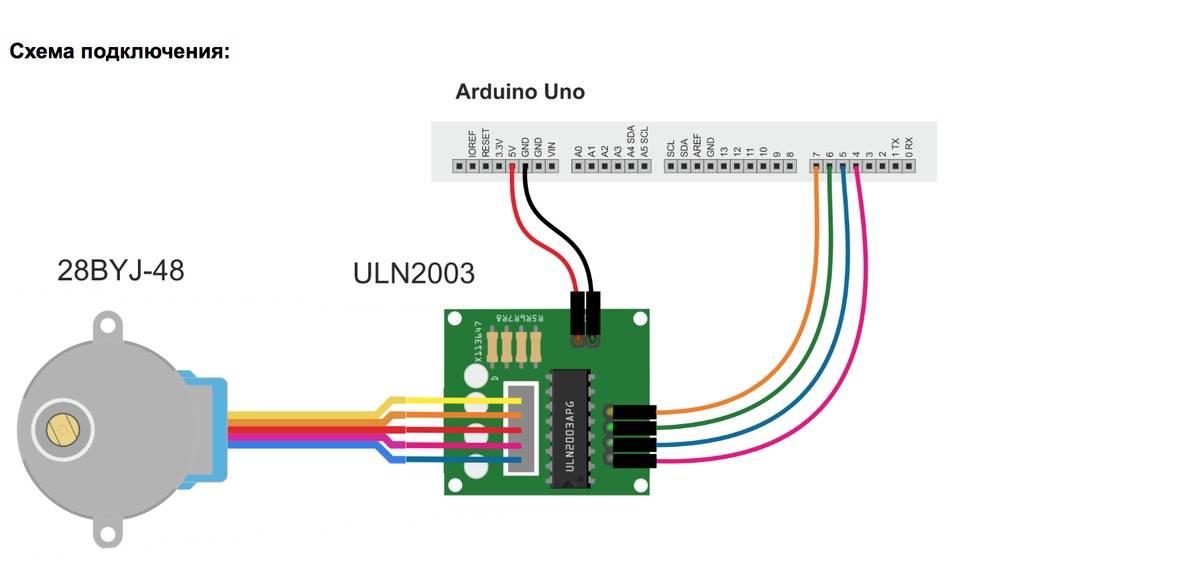
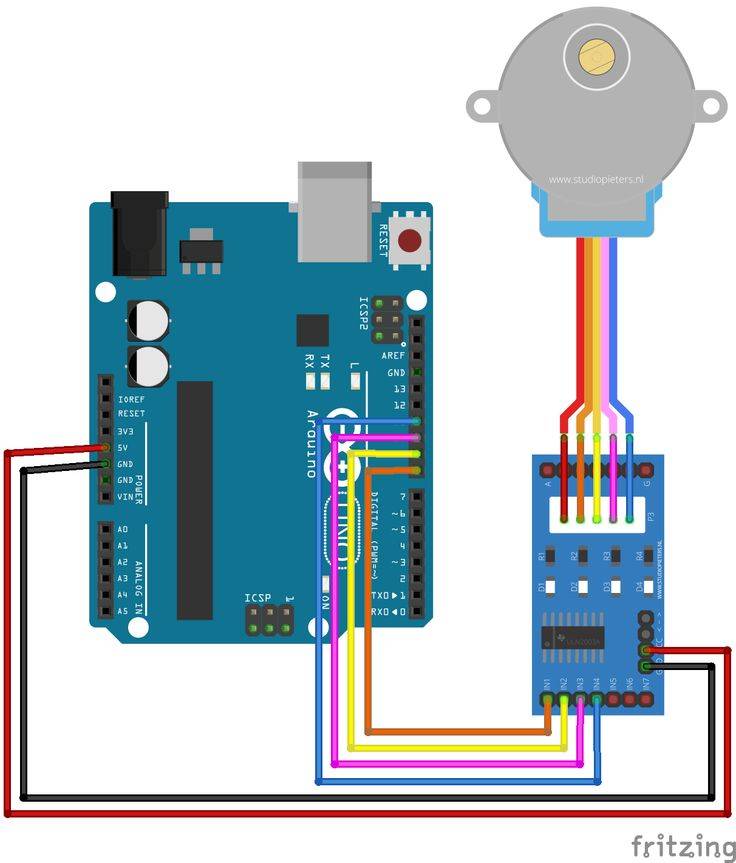
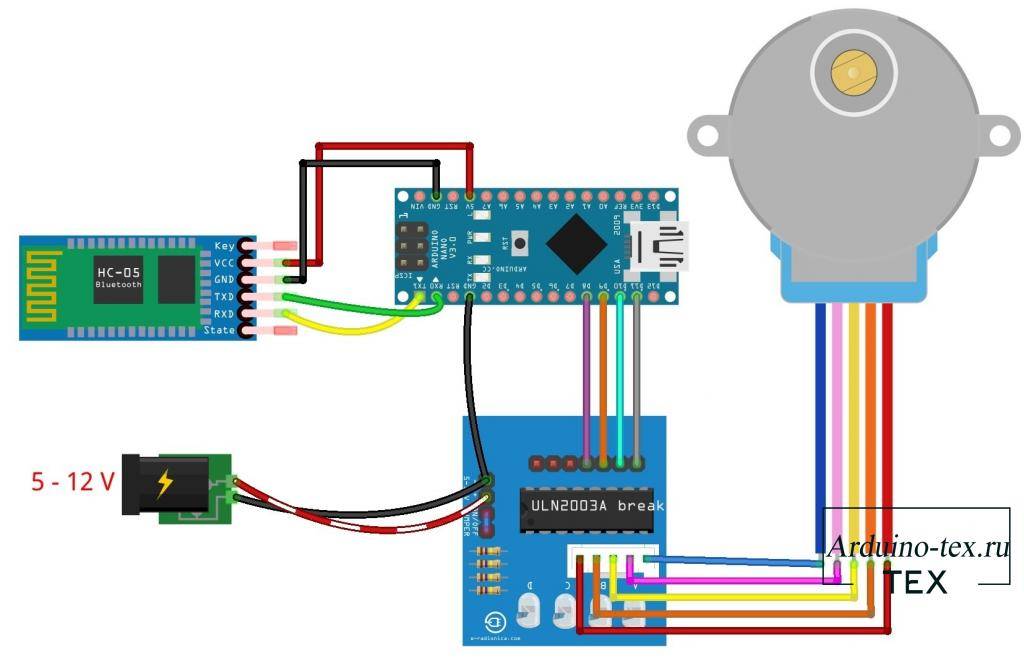
Схема неверна! На схеме биполярный двигатель (4 провода). На рисунке униполярный двигатель (5 проводов). Вот правильная, для 28byj-48 схема.
Чувствую, что вы правы, но не верить PDF’ке как-то сразу не получается. Т.е. получается, что ULN2003 подключает моторчик к +5? Т.е. у меня униполярный двигатель? Меня надули?
а может товарищу попробовать библиотеку Stepper.h, она прямо так работает:
Драйверы для биполярника, насколько я знаю, стоят дороже.
0 это 0. GND это GND
Для шаговика из DVD есть A4988 и аналоги
Вот тут работает на меге 2560 и l298.
Объяснение программы для платы Arduino
Перед тем как начать писать программу для платы Arduino давайте разберемся что должно происходить внутри этой программы. Как мы уже говорили ранее, мы будем использовать метод 4-шаговой последовательности, то есть нам нужно будет сделать 4 шага чтобы выполнить один полный оборот двигателя.
| Номер шага | Контакты, на которое подается питание | Катушки, на которое подается питание |
| Шаг 1 | 8 и 9 | A и B |
| Шаг 2 | 9 и 10 | B и C |
| Шаг 3 | 10 и 11 | C и D |
| Шаг 4 | 11 и 8 | D и A |
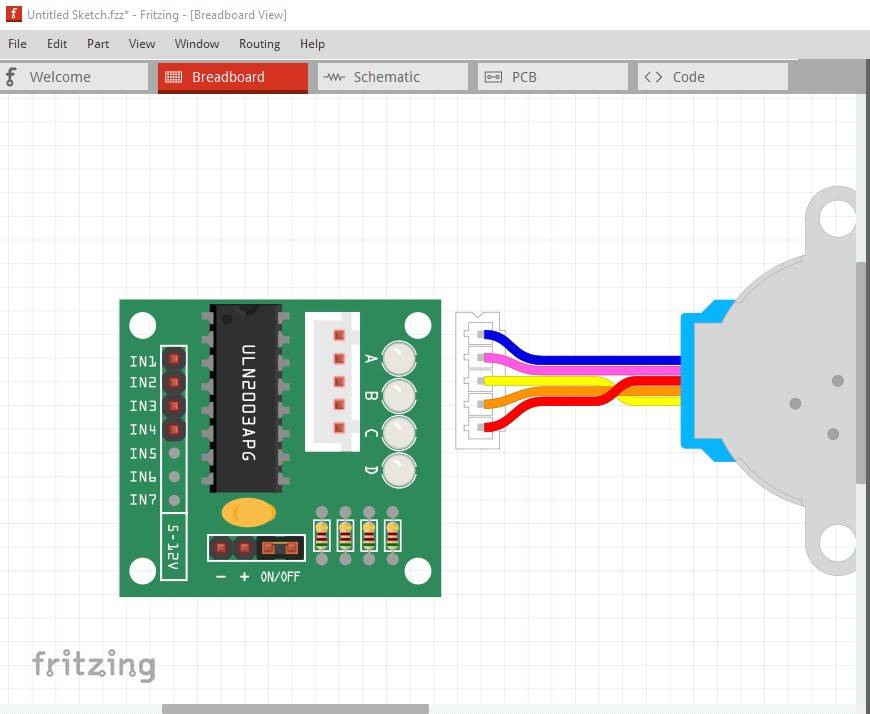
На драйвере мотора есть 4 светодиода, по свечению которых можно судить о том, на какую катушку подается питание в конкретный момент. Более подробно все эти процессы можно посмотреть в видео, приведенном в конце статьи.
Мы напишем программу, в которой необходимое количество шагов для двигателя мы будем вводить в мониторе последовательного порта (serial monitor) платы Arduino. Полный текст программы приведен в конце статьи, здесь же мы рассмотрим наиболее важные его фрагменты.
Как мы рассчитали ранее, полное число шагов для полного оборота нашего шагового двигателя, равно 32, пропишем это в следующей строчке кода:
#define STEPS 32
Далее мы должны сказать плате Arduino через какие ее контакты мы будем управлять шаговым двигателем (то есть к каким ее контактам подключен драйвер мотора).
Stepper stepper (STEPS, 8, 10, 9, 11);
Примечание: последовательность номеров контактов, указанная в приведенной команде (8,10,9,11) – специально упорядочена таким образом чтобы подавать питание на катушки шагового двигателя в правильном порядке. Если вы измените номера контактов, к которым подключен шаговый двигатель, то вы соответствующим образом должны их упорядочить для подачи в приведенную команду.
Мы будем использовать специальную библиотеку для работы с шаговыми двигателями, поэтому для задания скорости вращения шагового двигателя мы можем использовать команду вида:
stepper.setSpeed(200);
Для двигателя 28-BYJ48 скорость вращения можно установить в диапазоне от 0 до 200.
Теперь, чтобы двигатель сделал один шаг, мы можем использовать следующую команду:
stepper.step(val);
Количество шагов, которое должен сделать двигатель, определяется переменной “val”. Поскольку мы имеем 32 шага (для оборота) и передаточное число 64 мы должны сделать 2048 (32*64=2048) “шагов” в этой команде для совершения одного полного оборота двигателя.
Соответственно, чтобы шаговый двигатель сделал один шаг по часовой стрелке, необходимо использовать команду:
stepper.step(1);
А один шаг против часовой стрелки:
stepper.step(-1);
В нашей программе мы будем считывать значение на аналоговом контакте A0 платы Arduino и сравнивать его с предыдущим значением (Pval). Если оно увеличилось, то мы будем делать 5 шагов двигателем по часовой стрелке, а если уменьшилось – то 5 шагов двигателем против часовой стрелки.
potVal = map(analogRead(A0),0,1024,0,500); if (potVal>Pval) stepper.step(5); if (potVal stepper.step(-5); Pval = potVal;
Arduino Code – Using Built-in Stepper Library
For our first experiment we will be using the Arduino Stepper Library that is packaged with your Arduino IDE.
The stepper library takes care of the stepping sequence and makes it easy to control a wide variety of stepper motors, both unipolar and bipolar.
Here is the simple sketch that makes the stepper motor spin slowly clockwise and then rapidly counterclockwise.
Code Explanation:
Sketch begins with including the built-in Stepper library.
Next, we define a constant that holds the number of ‘steps’ the motor will take to complete one revolution. In our case, it is 2038.
The 28BYJ-48 unipolar stepper motor has a step sequence of IN1-IN3-IN2-IN4. We will use this information to drive the motor by creating an instance of a stepper library called with a pin sequence of 8, 10, 9, 11.


Make sure you get it right or else the motor will not work properly.
There is nothing to set in the setup function because the stepper library internally sets the four I/O pins as outputs.
In the loop function, we use the function to set the speed we want the stepper motor to move and later use the function to tell it how many steps to rotate. Passing a negative number to the function reverses the motor’s spinning direction.
The first code snippet makes the motor spin clockwise very slowly. And the other makes the motor spin counter-clockwise at a very high speed.
Please note that is a blocking function. This means it will wait until the motor has finished moving, to pass control to the next line in your sketch. For example, if you set the speed to, say, 1 RPM and called on a 100-step motor, this function will take a full minute to finish.
Обзор драйвера A4988
Шаговые двигатели представляют собой электромеханические устройства, задачей которых является преобразование электрических импульсов в перемещение вала двигателя на определенный угол. Достоинствами шаговых двигателей по сравнению с простыми являются:
- Высокая точность позиционирования и повторяемости — качественные ШД имеют точность не хуже 2,5 % от величины шага, при этом данная ошибка не накапливается при последующих шагах;
- Шаговый двигатель может быстро стартовать, останавливаться и выполнять реверс;
- Четкая взаимосвязь угла поворота ротора от количества входных импульсов (в штатных режимах работы) позволяет выполнять позиционирование без применения обратной связи;
- Шаговые двигатели обеспечивают получение сверхнизких скоростей вращения вала без использования редуктора;
- Шаговые двигатели работают в широком диапазоне скоростей, поскольку. скорость напрямую зависит от количества входных импульсов.
Шаговые двигатели применяются там, где требуется высокая точность перемещений. Примеры использования – принтеры, факсы и копировальные машины, станки с ЧПУ, 3D-принтеры. Для управления шаговыми двигателями используют специальные устройства – драйверы шаговых двигателей. Популярный драйвер шагового двигателя А4988 (рис. 1) работает от напряжения 8 – 35 В и может обеспечить ток до 1 А на фазу без радиатора (и до 2 A с радиатором). Модуль A4988 имеет защиту от перегрузки и перегрева. Одним из параметров шаговых двигателей является количество шагов на один оборот 360°. Например, для шаговых двигателей Nema17 это 200 шагов на оборот, т.е 1 шаг равен 1.8°. Драйвер A4988 позволяет увеличить это значение за счёт возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).

Рисунок 1. Драйвер биполярных двигателей A4988
Step 4: Controlling the Motor


That’s it, we are almost ready to make our motor turn. The only things to do is:
- to remove our multimeter from our system if not already done,
- connect MS1 to 5V which will make the driver use half-steps (I had trouble getting the robot to turn with full steps on 5V. But as a part of my objective was to make everything run on 5V I accepted to sacrifice a bit of speed and to gain some precision),
- provide the STEP and DIR pins with what we want from our controller.
Then: if you want to control the motor using Arduino, simply follow the article here where you’ll find a sample code. If you want to control it with the micro:bit then stay with me a little longer.
Plug pin 2 of the micro:bit to STEP, pin 8 to DIR, upload the program attached using your favorite micro:python editor (I used mu-editor). This program basically sets a PWM on pin 2 with a period of 1 millisecond (and a 50% duty cycle), and your motor should be rotating. Set pin 8 to 0 or 1 to make it turn one way or another and change the period to make it turn the speed you want (as long as you don’t want it to go too fast… for me a pulse every millisecond was close to the maximum speed I could reach).
To make things a bit more compact and embark it easily on a mobile robot I made a little board. The board is shown in the picture above. In the image there is a purple wire going from VMOT to VDD that is hiding in the shadow. Also, the yellow wire going from SLP to RST is actually not soldered, I just put it there to represent the solder I put on the back of the board to connect those 2 pins. Remark: the heat sink is normally not required with such a system, as we draw much, much less than 1A.
That’s it, I hope this instructable will help many of you enjoy the power of stepper motor in your projects.
Conclusion
In this article I have shown you how you can control a 28BYJ-48 stepper motor with a ULN2003 driver and Arduino. We have looked at 4 examples, using both the Stepper and AccelStepper libraries. I hope you found it useful and informative. If you did, please share it with a friend that also likes electronics!
I would love to know what projects you plan on building (or have already built) with this stepper motor.If you have any questions, suggestions, or if you think that things are missing in this tutorial, please leave a comment down below.
Note that comments are held for moderation to prevent spam.
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.

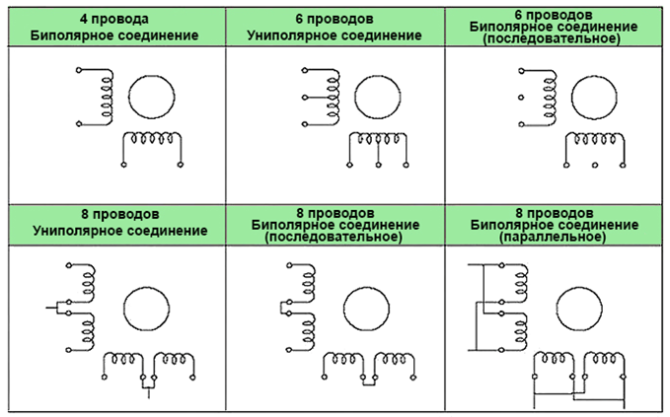
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
Полушаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).