Управление по напряжению с пропорциональным управлением
При управлении по напряжению с пропорциональным управлением рассогласование выходного напряжения должно вносить поправку в скважность управляющих импульсов. Пропорцию между величиной рассогласования и величиной коррекции скважности обеспечивает усилитель ошибки и фильтр петли регулирования
Управление по напряжению с пропорциональным управлением используется сравнительно редко, так как при этом методе управления индуктивность может входить в насыщение при запуске источника и при коротком замыкании на выходе, требуется петлевой фильтр второго порядка и есть влияние входного напряжения на коэффициент усиления усилителя ошибки.
Управление по напряжению с пропорциональным управлением можно реализовать на встроенной периферии PIC контроллеров с помощью ШИМ модулятора – необходим генератор пилы (Ramp генератор) и компаратор (реализацию ШИМ модуляторов мы уже рассматривали в )
Генерируемый микроконтроллером опорный ШИМ служит для формирования пилообразного напряжения и определяет частоту управляющих импульсов, а напряжение обратной связи определяет скважность управляющих импульсов
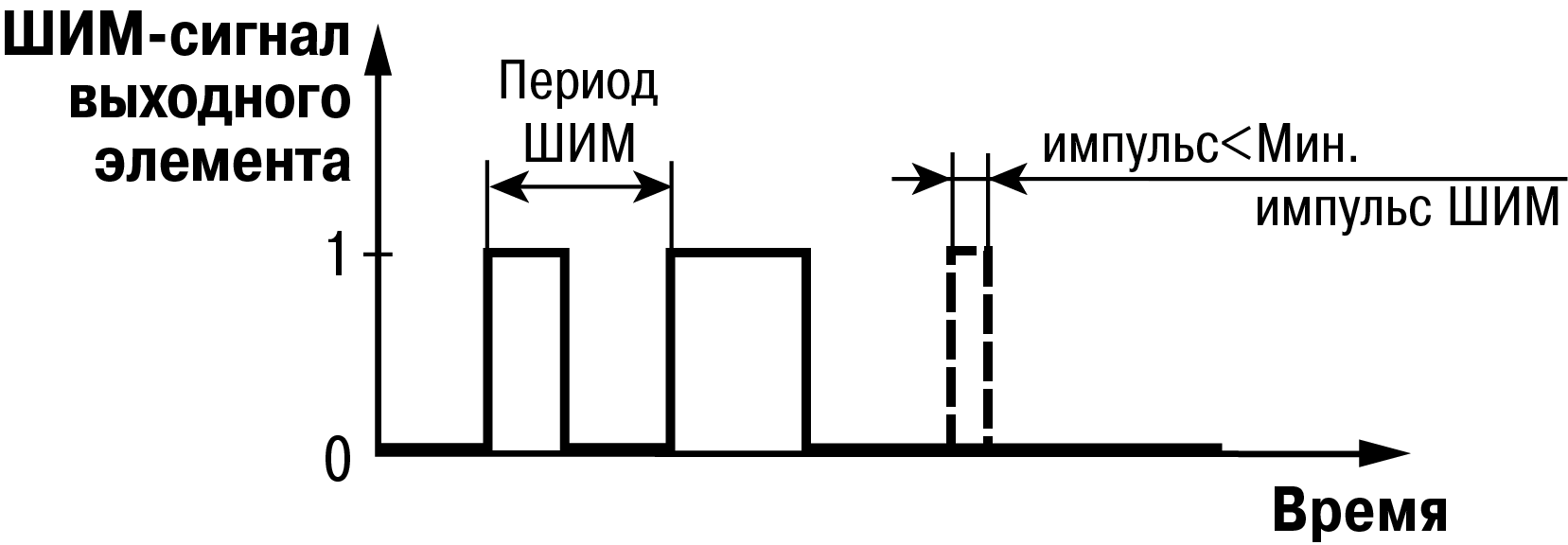
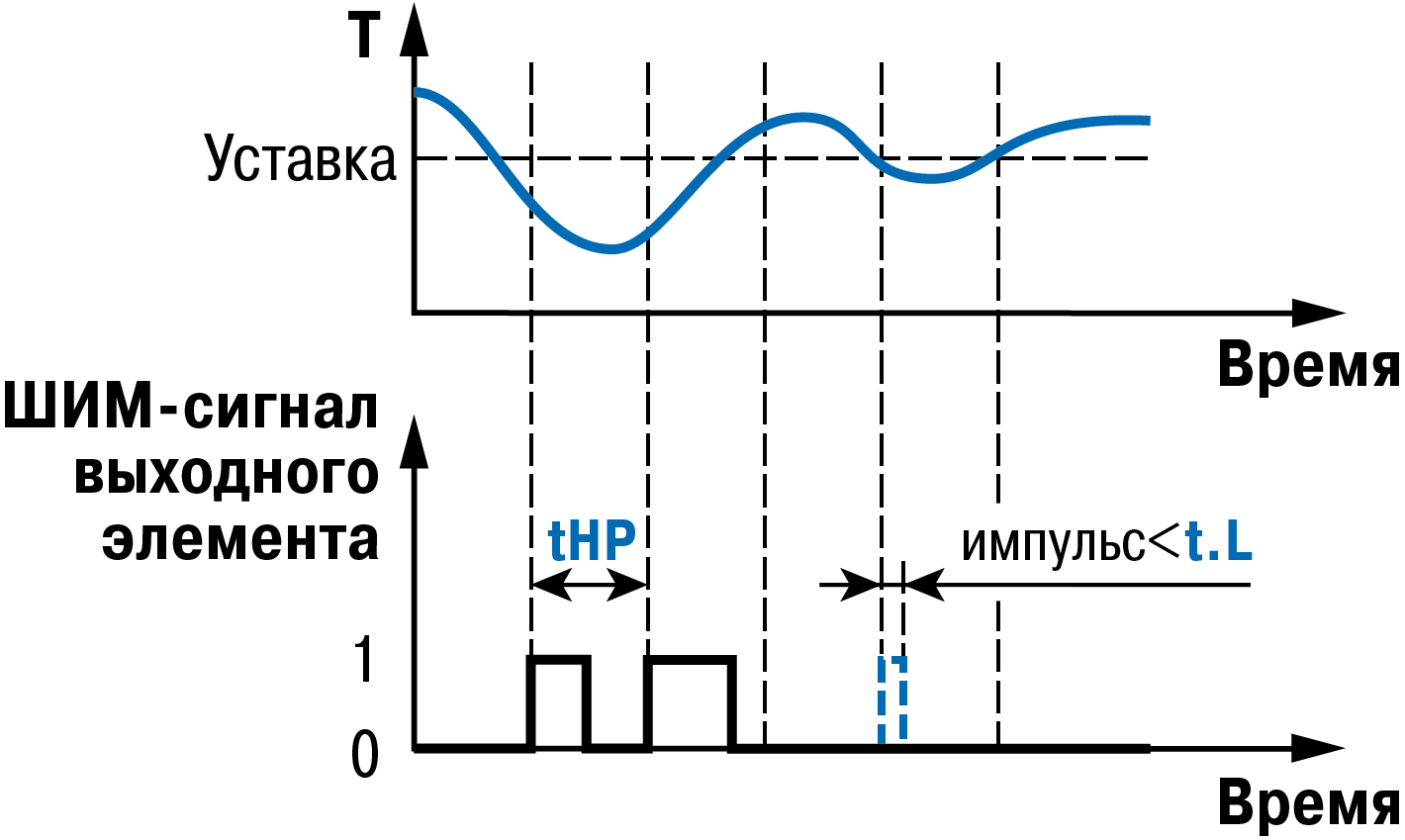
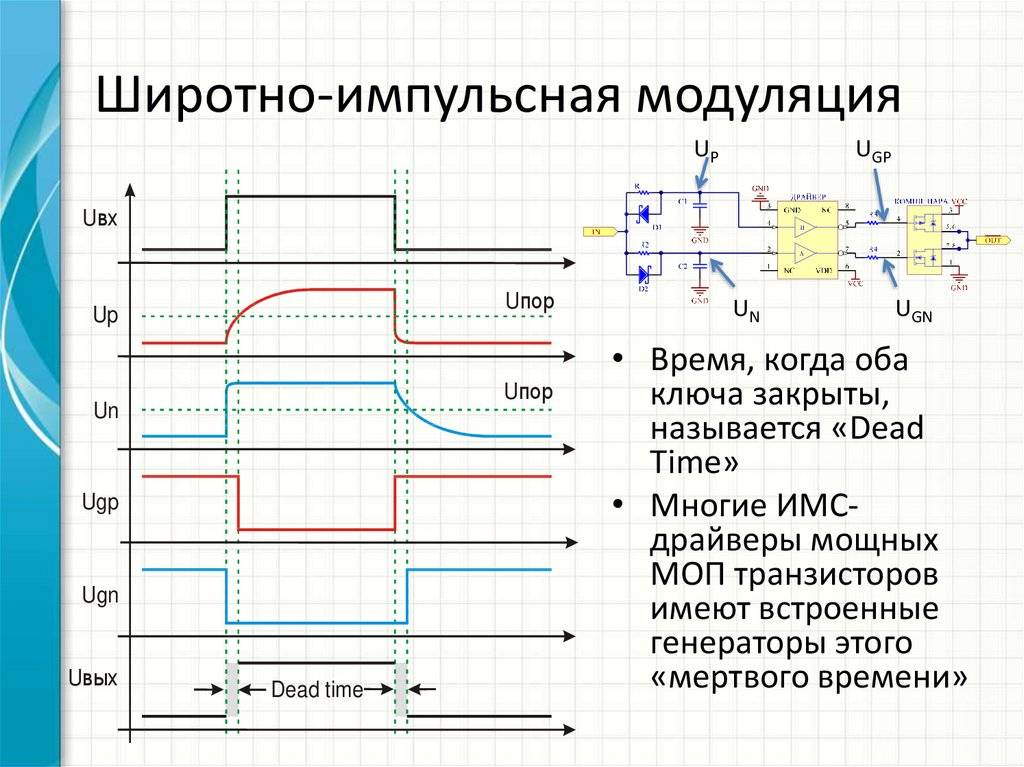
Для предотвращения насыщения индуктивности при запуске источника или при коротком замыкании на выходе нужно ограничить скважность управляющего сигнала. Для этого выходной сигнал компаратора (CMP1_out) подаем на CLC (элемент И), а на другой вход – опорный ШИМ формирования пилы (сигнал PWM рис
10). Длительность импульса ШИМ будет служить ограничителем скважности управляющего сигнала DRV (ограничивать сигнал с выхода компаратора).
Принцип работы ШИМ
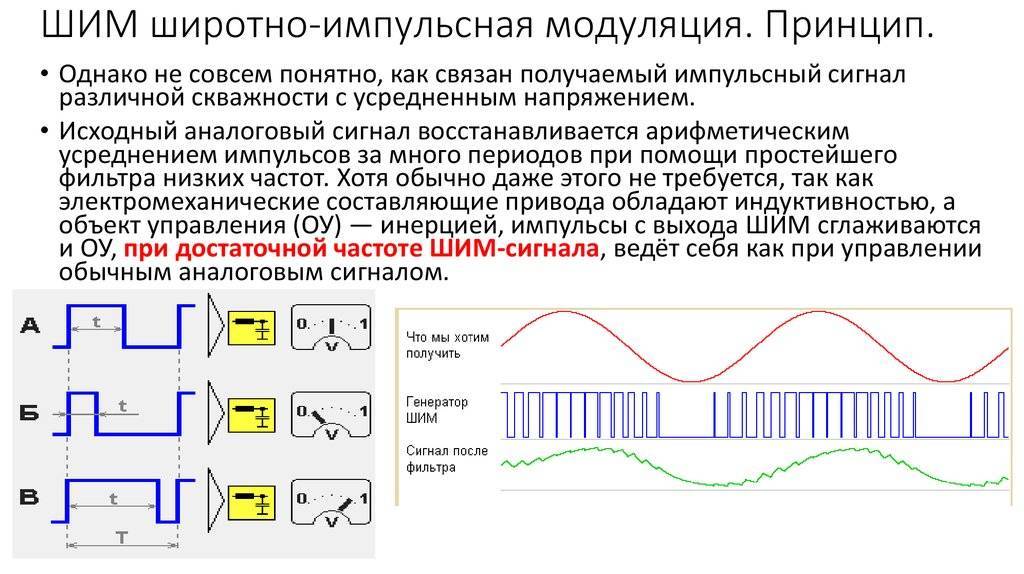
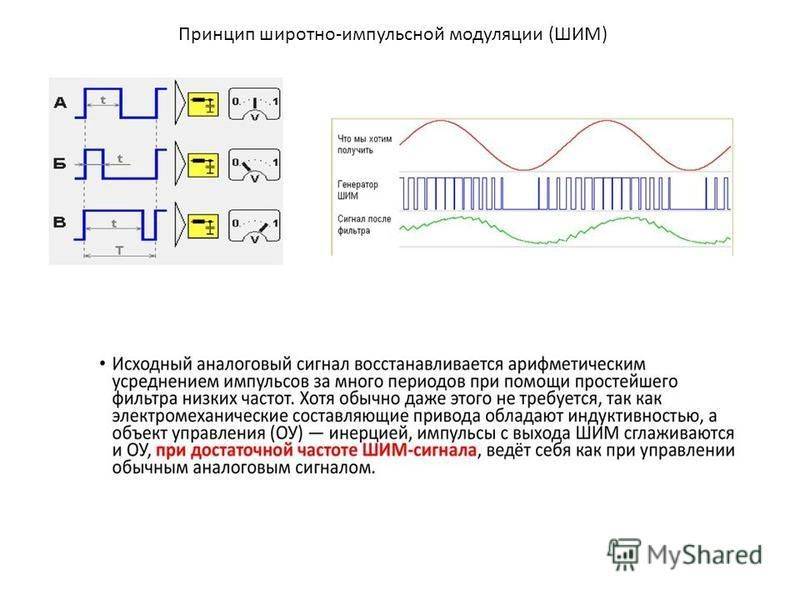
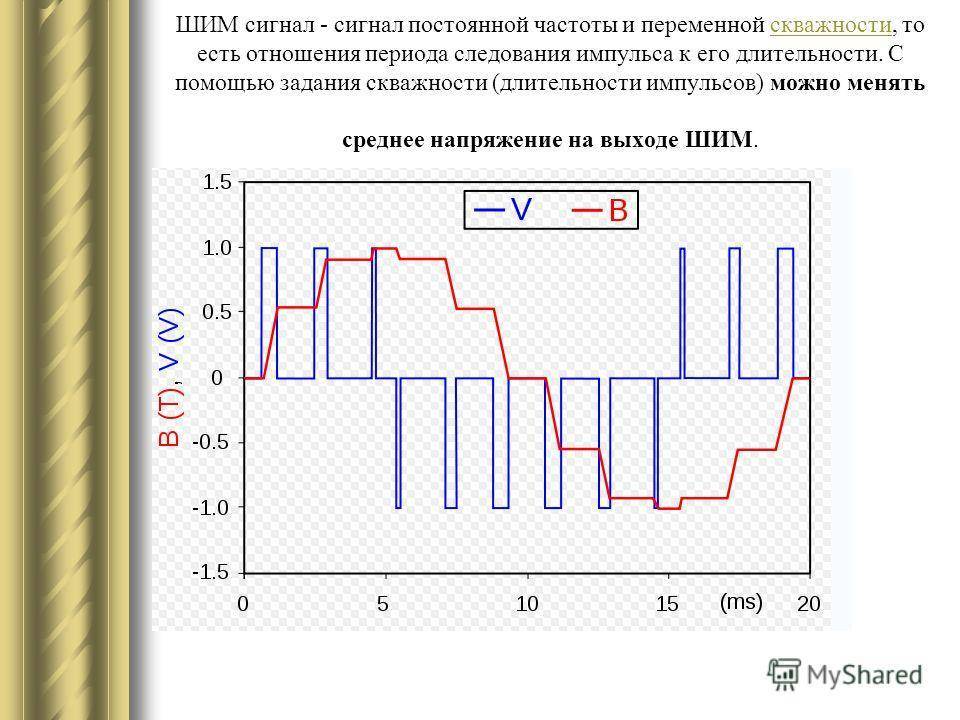
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
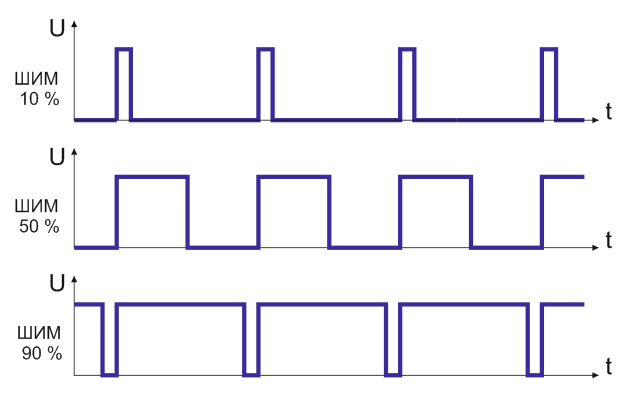
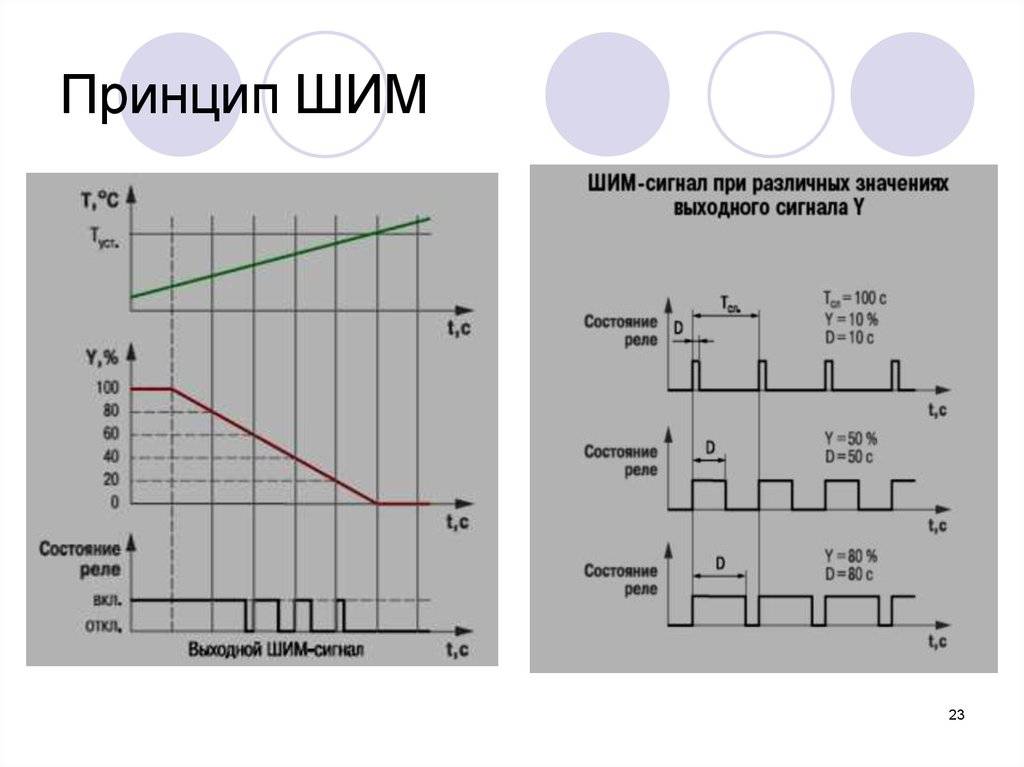
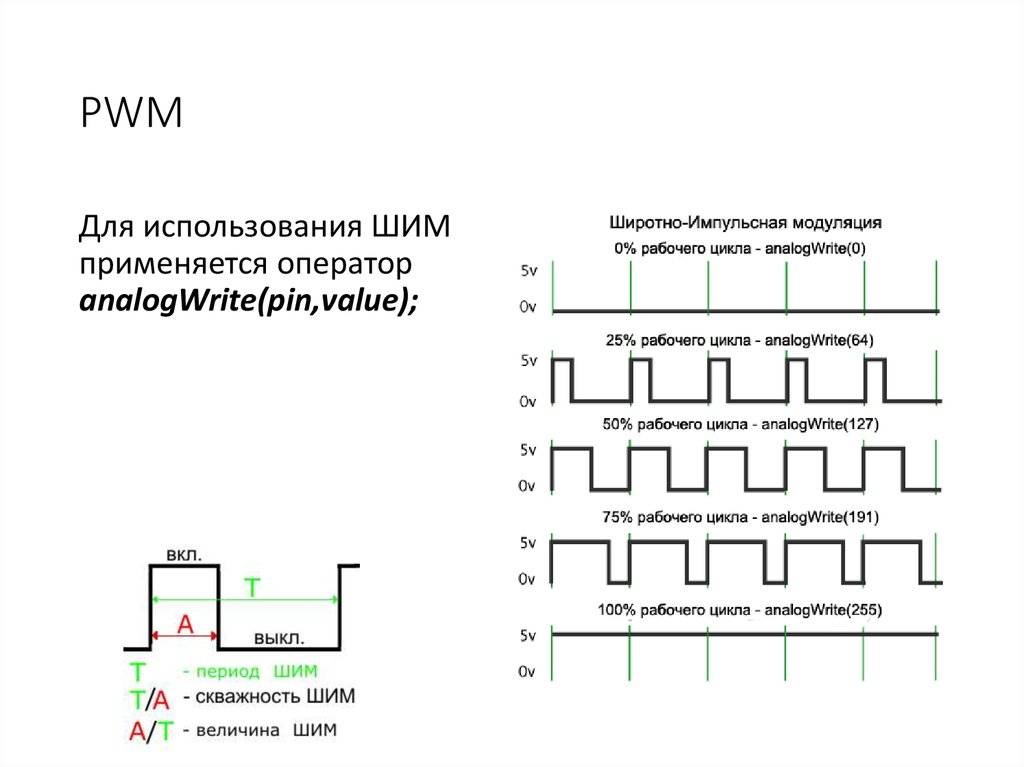
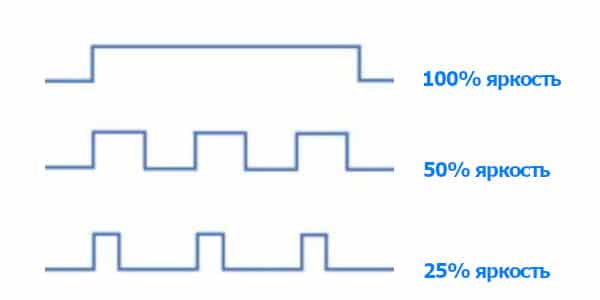
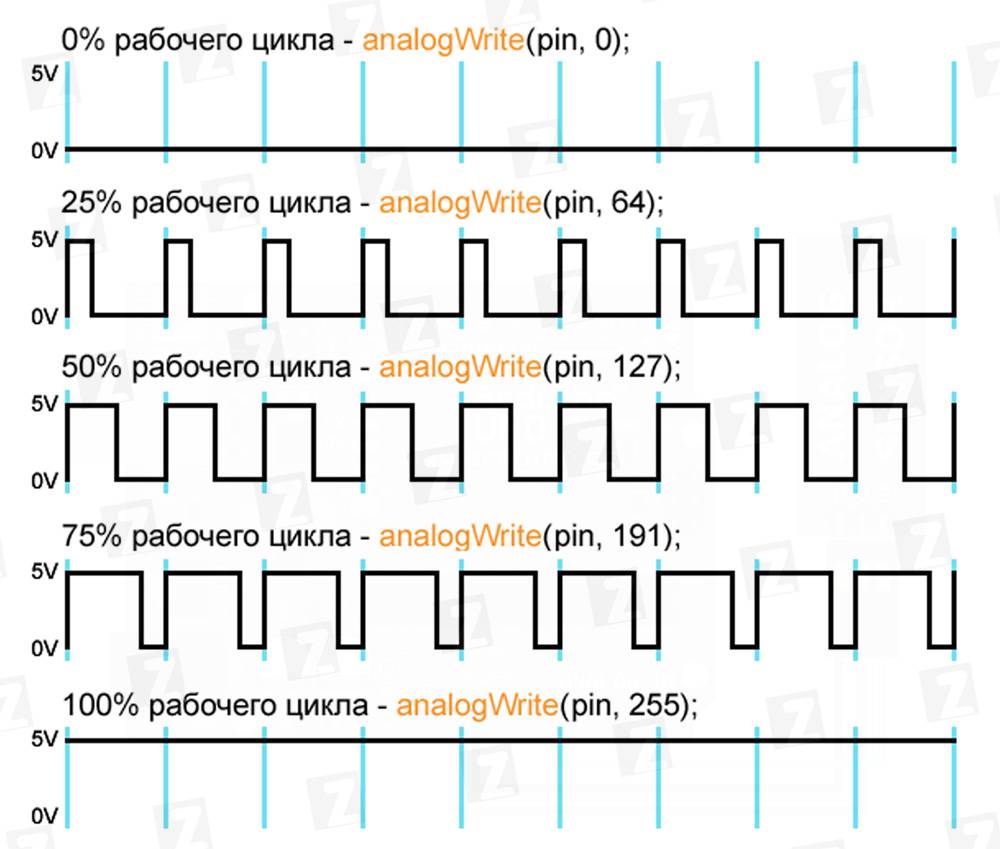
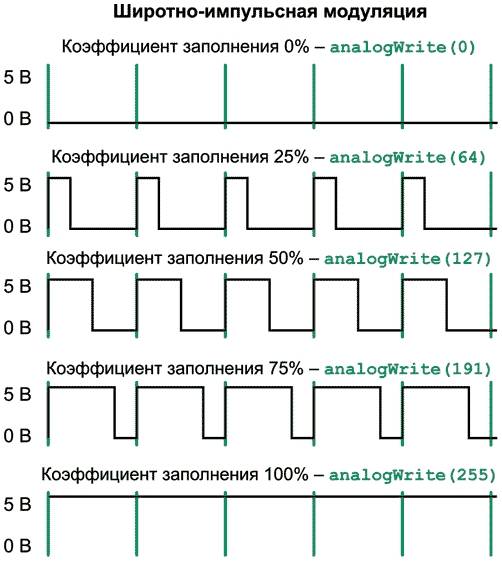
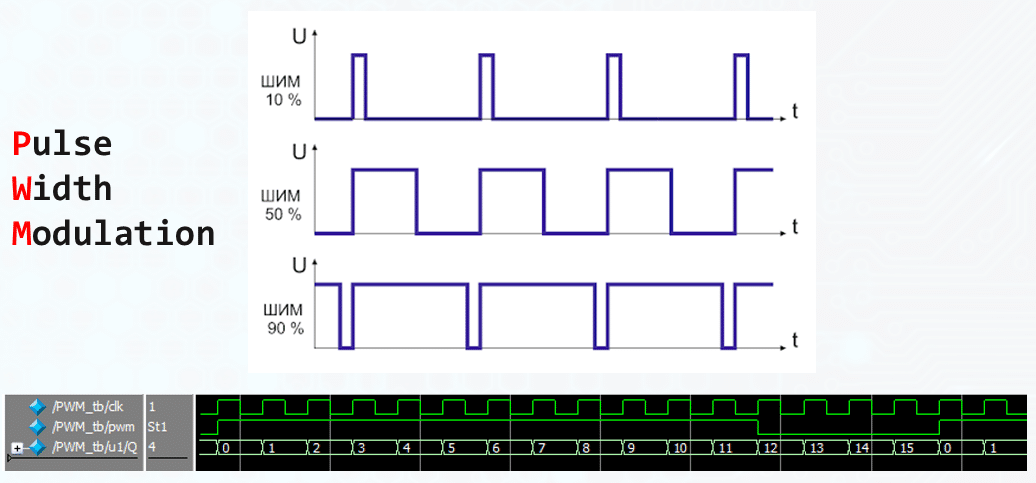
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:. Скважность ШИМ
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
T(перод) = 1/f(частота)
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Формирование аналогового сигнала
AnalogRead – это функция, которая используется для считывания аналоговых значений из аналоговых контактов ШИМа на Ардуино. Плата Arduino UNO имеет 6-канальный 10-битный аналого-цифровой преобразователь (АЦП). Это означает, что АЦП в Arduino UNO будет отображать входные напряжения от 0 до 5 В в целое значение от 0 до 1023.
Следовательно, функция analogRead возвращает любое значение от 0 до 1023. Синтаксис функции analogRead – analogRead (аналоговый вывод no).
Поскольку мы считываем аналоговые напряжения от потенциометра на выводе A0, нам нужно написать analogRead (A0) в эскизе. Когда он возвращает целочисленное значение, с ним создается временная переменная целочисленного типа данных. Следующая функция – analogWrite. Это функция, которая используется для установки рабочего цикла сигнала ШИМ для любого заданного штыря ШИМ.
Синтаксис функции analogWrite – analogWrite (вывод PWM no, value).
Значение указывает рабочий цикл и должно быть значением от 0 (0 В) до 255 (5 В).
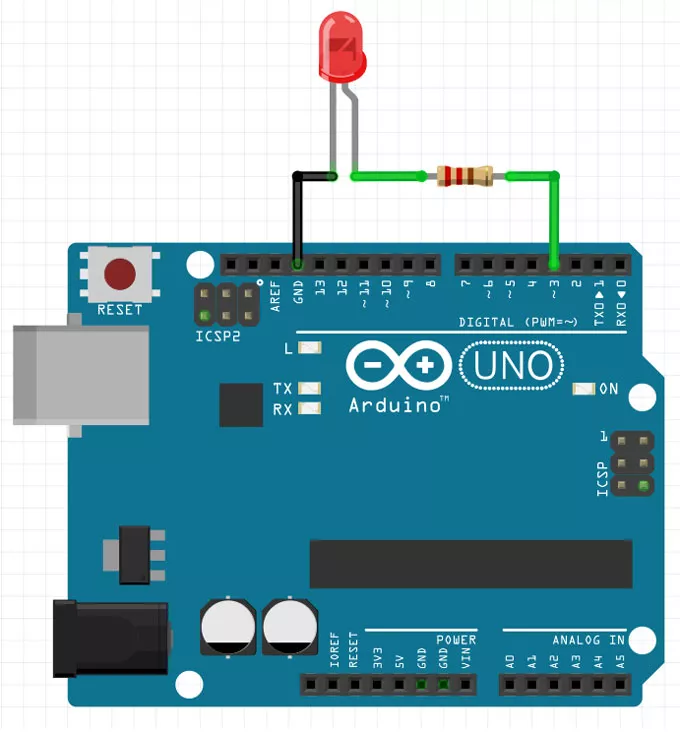
Перейдем к фактическому эскизу схемы управления яркостью светодиода. Окончательный эскиз показан на следующем рисунке.
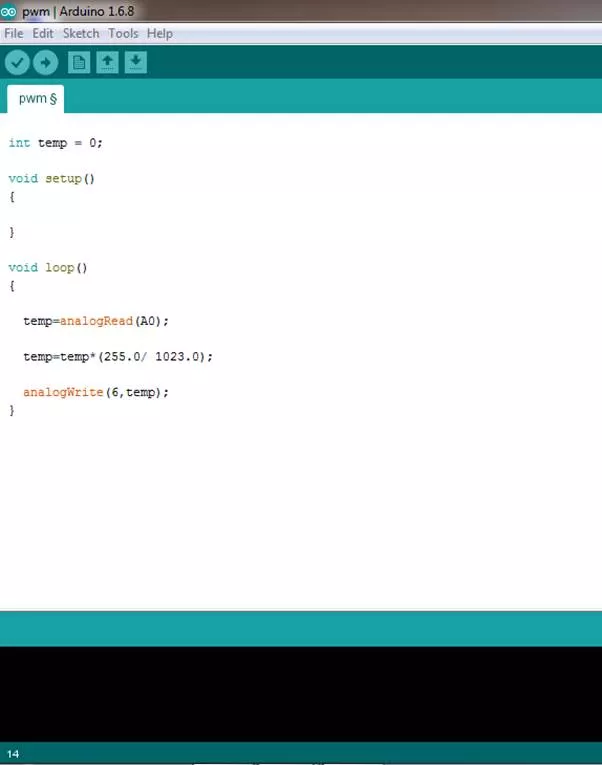
Из приведенного выше эскиза мы можем легко понять, что значение, возвращаемое функцией analogRead, сохраняется в переменной temp. Это значение будет использоваться для управления рабочим циклом сигнала ШИМ с помощью функции analogWrite.
Но диапазон значений, принимаемых функцией analogWrite, находится в диапазоне от 0 до 255. Следовательно, нам нужно выполнить некоторые математические вычисления, чтобы поместить подходящее значение в функцию analogWrite.
Наконец, вычисленное значение помещается в функцию analogWrite вместе с выводом PWM для получения сигнала PWM.
Когда схема построена, и эскиз загружен в Arduino, мы видим, что, изменяя положение потенциометра, яркость светодиода мы также можем изменить.
Еще один вариант скетча для Ардуино:
int ledPin = 3; // объявляем пин, управляющий светодиодом
int brightness = 0; // переменная для задания яркости
int fadeAmount = 5; // шаг изменения яркости
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin
brightness += fadeAmount; // изменяем значение яркости
/* при достижении границ 0 или 255
меняем направление изменения яркости */
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount; // изменяем знак шага
}
delay(30); // задержка для большей видимости эффекта
}Как увеличить частоту и разрядность ШИМ Ардуино
Не существует способа изменить частоту ШИМ Arduino без прямого управления памятью на низком уровне. Рассмотрим далее, как изменить режим работы таймера, чтобы увеличить частоту (frequency) ШИМ Ардуино. Таймер 0 используется для расчета времени, т.е. функции и millis. Увеличение частоты на Таймер 0 приведет к нарушению функций сохранения времени, которые могут использоваться в скетче.
Чтобы увеличить разрядность Ардуино на 9 и 10 аналоговом выходе, изменим частоту Таймера 1 без библиотеки. Максимальная частота PWM может достигать на платах Ардуино Уно и Нано — 62 500 Гц. Для этого в процедуре необходимо добавить соответствующую команду из таблицы, которая приведена далее.
| Разрешение | Частота ШИМ | Команды установки режима |
| 8 бит | 62 500 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x09; |
| 7 812,5 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0a; | |
| 976,56 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0b; | |
| 244,14 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0c; | |
| 61,04 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0d; |
Максимальная частота ШИМ Ардуино (Arduino PWM Frequency) — 62 500 Гц.
Схема работы импульсного блока питания
Это устройство появилось на свет всего лишь несколько десятилетий назад. Однако уже успело стать популярным и востребованным. Импульсный блок питания состоит из следующих деталей:
- Фильтрующего конденсата.
- Ключевого силового транзистора.
- Сетевого выпрямителя, состоящего из нескольких элементов.
- Выпрямительных диодов выходной системы.
- Силовой дроссели. Дроссель помогает корректировать возникающее напряжение.
- Импульсивного источника питания. Именно отсюда напряжение преобразовывается в силовую цепь.
- Цепей управления выходного напряжения.
- Накопительной фильтрующей ёмкости;
- Оптопара;
- Задающего генератора.
- схемы обратной связи.
Зная состав импульсного блока, следует ознакомиться с принципом его работы.
Принцип работы импульсного блока
 Принцип работы импульсного блока заключается в выдаче стабилизированного питающего напряжения на основе принципа взаимодействия элементов инертной системы. Вот поэтапные шаги, наглядно демонстрирующие всю суть деятельности такого блока питания:
Принцип работы импульсного блока заключается в выдаче стабилизированного питающего напряжения на основе принципа взаимодействия элементов инертной системы. Вот поэтапные шаги, наглядно демонстрирующие всю суть деятельности такого блока питания:
- Передача сетевого напряжения на выпрямитель (осуществляется при помощи специальных проводов).
- С помощью фильтра выпрямителя происходит сглаживание напряжения. В этом процессе принимают участие и конденсаторы.
- с помощь диодного входного моста выпрямляются синусоиды. Далее при участии транзисторной системы проходящие синусоиды должны преобразоваться в высокочастотные импульсы. Зачастую импульсы имеют прямоугольную форму.
Но возникает вопрос, какую роль в импульсном блоке играют шим — контролёры. Мы постараемся дать ответ на него в следующем подзаголовке.
Управление по току (Current Mode)
Данный метод устраняет недостаток режима управления по напряжению. В этом методе Контроллер получает вторую петлю обратной связи. Внутренний быстрый контур служит для контроля тока силового ключа (индуктивности) на каждом цикле его включения. При подаче сигнала на открытие силового ключа, ток через индуктивность, а значит и через силовой ключ, начинает линейно расти. При достижении порога силовой ключ размыкается, начинается отдача энергии индуктивности через диод. По времени или по детектированию нулевого тока в индуктивности (в режиме непрерывного тока или критической проводимости, CCrM) цикл повторяется.
Так как силовой ключ размыкается при достижении пикового тока, то обеспечивается постоянство накопленной энергии в индуктивности вне зависимости от входного напряжения (изменение входного напряжения влияет на скорость заряда). Второй контур петли регулирования контролирует выходное напряжение.
Управление по току с гистерезисным управлением: аналогично методу управления по напряжению – осуществляется Вкл/Выкл ШИМ управления силового ключа в зависимости от напряжения на выходе.
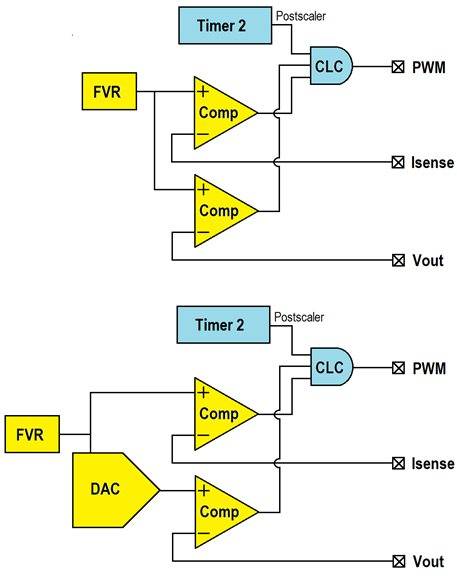
Рис.11а. ШИМ контроллер с управлением по току с гистерезисным управлением. Isence – контроль пика тока Is через индуктивность, Vout – проверка выходного напряжения, блокирование управляющего ШИМ при превышении выходного напряжения. Вариант с фиксированным выходным напряжением и с регулировкой выходного напряжения.
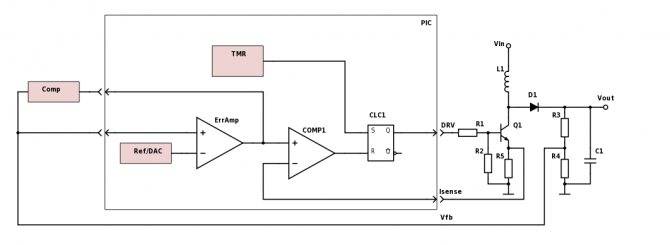
Рис. 11б. ШИМ контроллер и вариант выходной топологии для повышающего преобразователя с контролем пикового тока.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
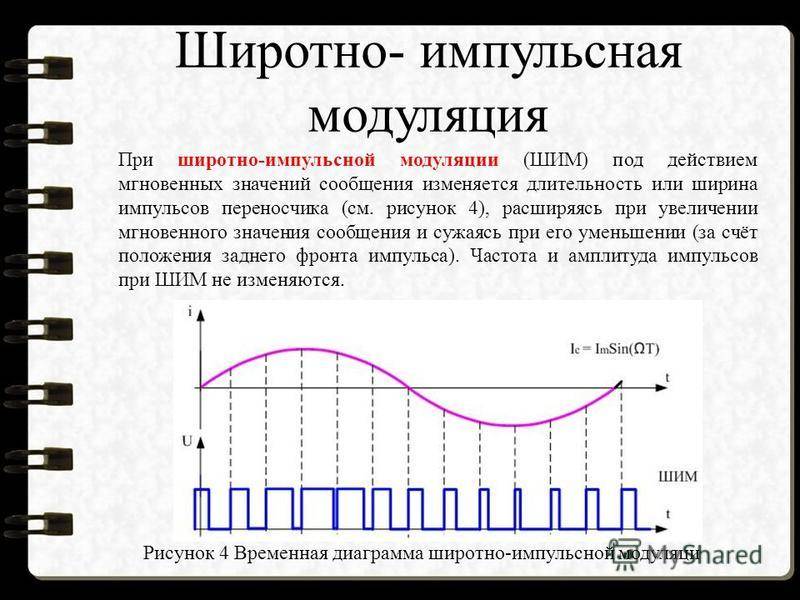
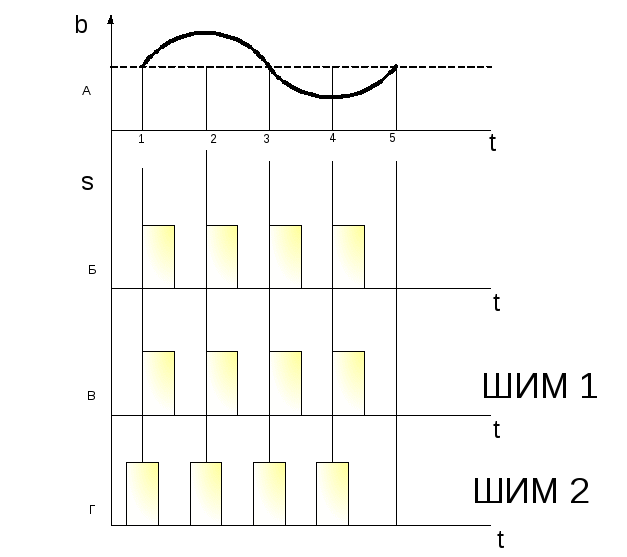
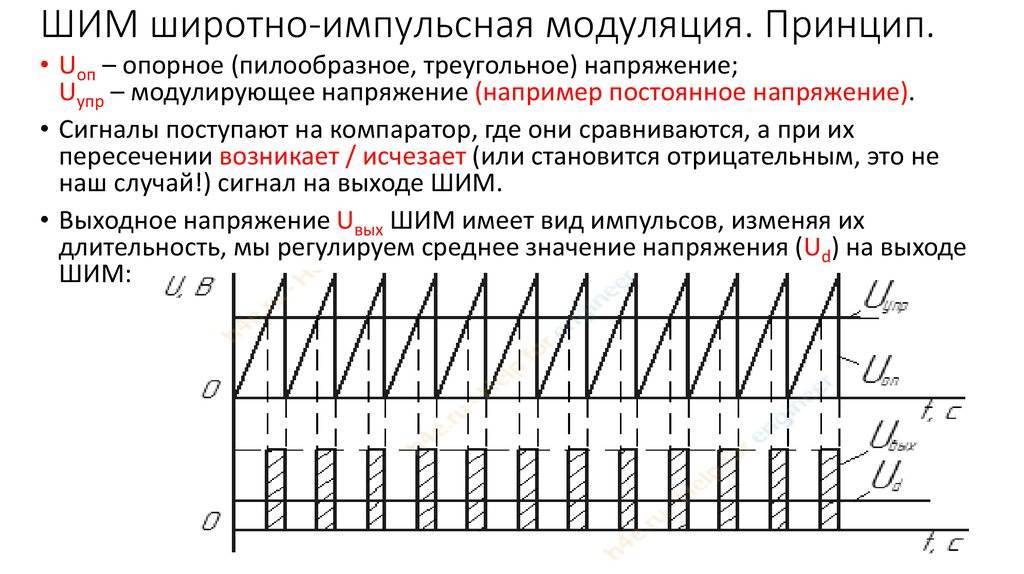
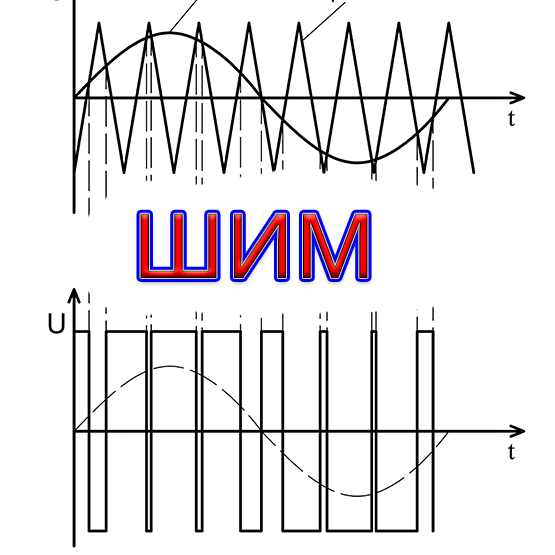
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
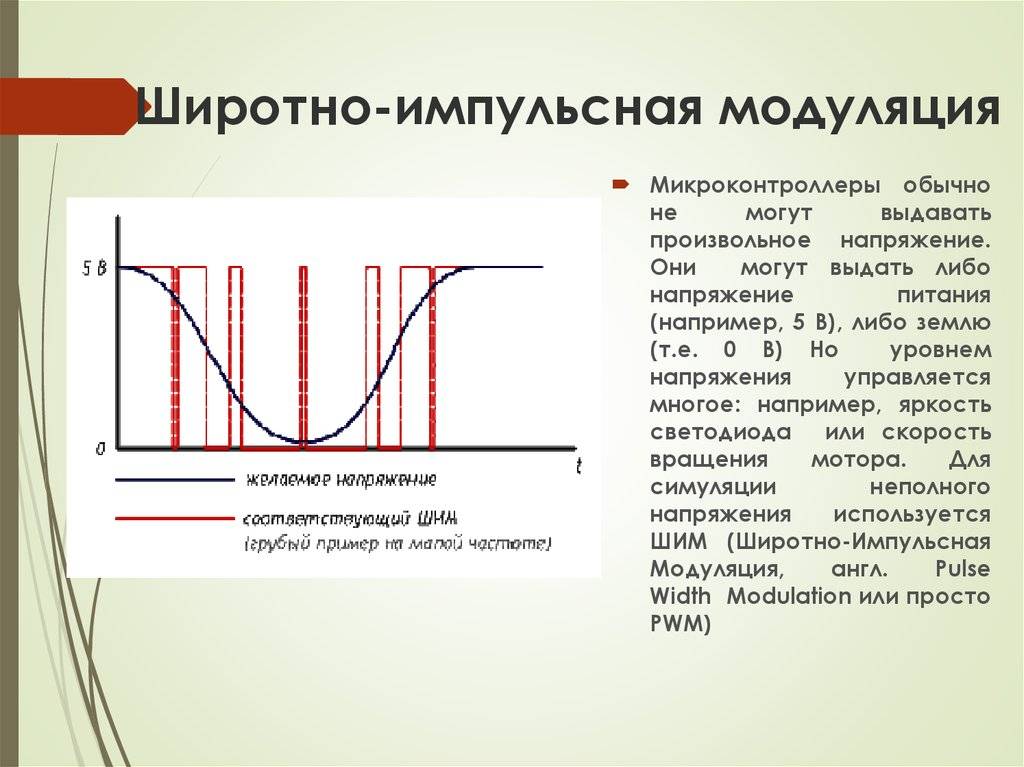
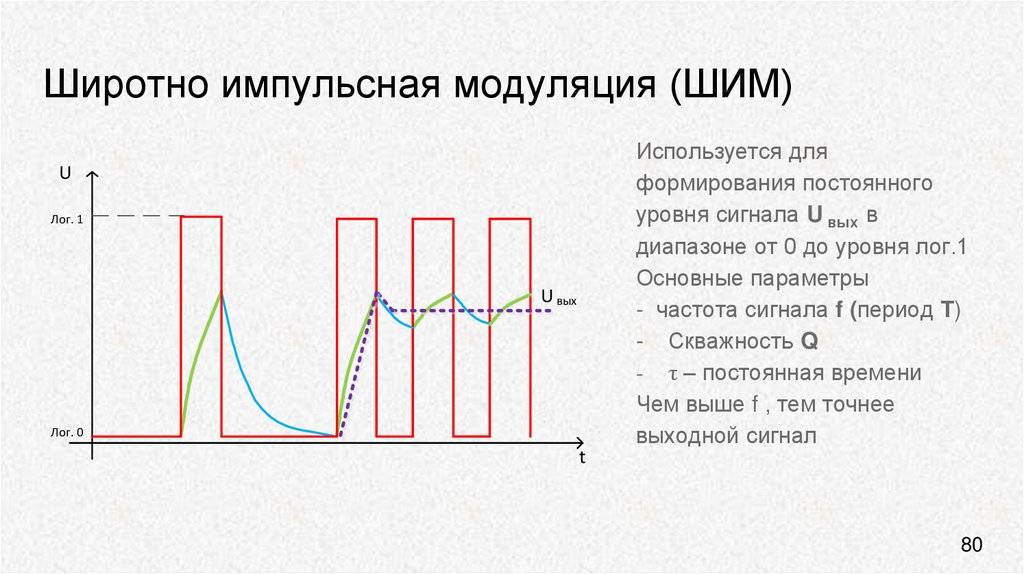
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Понятие шима
Прежде чем дать определение упомянутому словосочетанию, следует узнать или кому-то просто напомнить себе принцип нагревания силовых компонентов радиосхемы. Их сущность заключается в действии нескольких переключательных режимах. Все электросиловые компоненты в подобных радиосхемах всегда пребывают в двух состояниях. Первое — это открытое, а второе раскрытое. В чём разница между этими двумя состояниями? В первом случае компонент обладает нулевым током. Во втором же у компонента нулевое значение напряжения. Конечным результатом взаимодействия электросиловых компонентов с необходимой напряжённостью можно считать получения сигнала той формы, которая нужна согласно установленным правилам.
Шимом же называют специальный модулятор, предназначенный для контролирования времени открытия силового ключа. Время для открытия ключа устанавливается с учётом получаемого напряжения. Получить идеальный вариант сигнала возможно лишь в том случае, если перед преобразованием сигнал без затруднений прошёл все необходимые этапы. Какие это этапы из чего состоит формирование такого сигнала.
Особенности шим — контроллера
 Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
Вывод питания. Несёт большую ответственность за электрическое питание всех существующих схем. Нередко вывод питания путают с выводом контроля питания
Важно знать, что несмотря на похожие слова в названии, эти два понятия имеют совершенно разную характеристику. Это ещё раз наглядно докажет знакомство с выводом контроля питания.
Вывод контроля питания
Эта составляющая часть микросхемы следит за состоянием показателей напряжения прямо на выводе микросхемы. Главная задача вывода контроля питания — это не допустить превышение расчётной отметки. Существует одна серьёзная опасность, а именно снижения напряжения на выходе. Если напряжения снижено, транзисторы начинают открываться наполовину. Из-за неполного открытия они быстро нагреваются и в конечном счёте могут быстро выйти из строя. Поэтому умеренное напряжение — это залог долгой работы транзисторов микросхемы шим — контроллеров.
общий выход. Третий главный элемент схемы имеет форму ножки. Эта ножка, в свою очередь, подключена к общему проводу схемы, которые отвечает за питания всей системы.
Все три составляющих очень важны. Если хотя бы один из элементов по какой-то причине выходит из строя, работа всей микросхемы заметно ухудшается или совершенно прекращается.
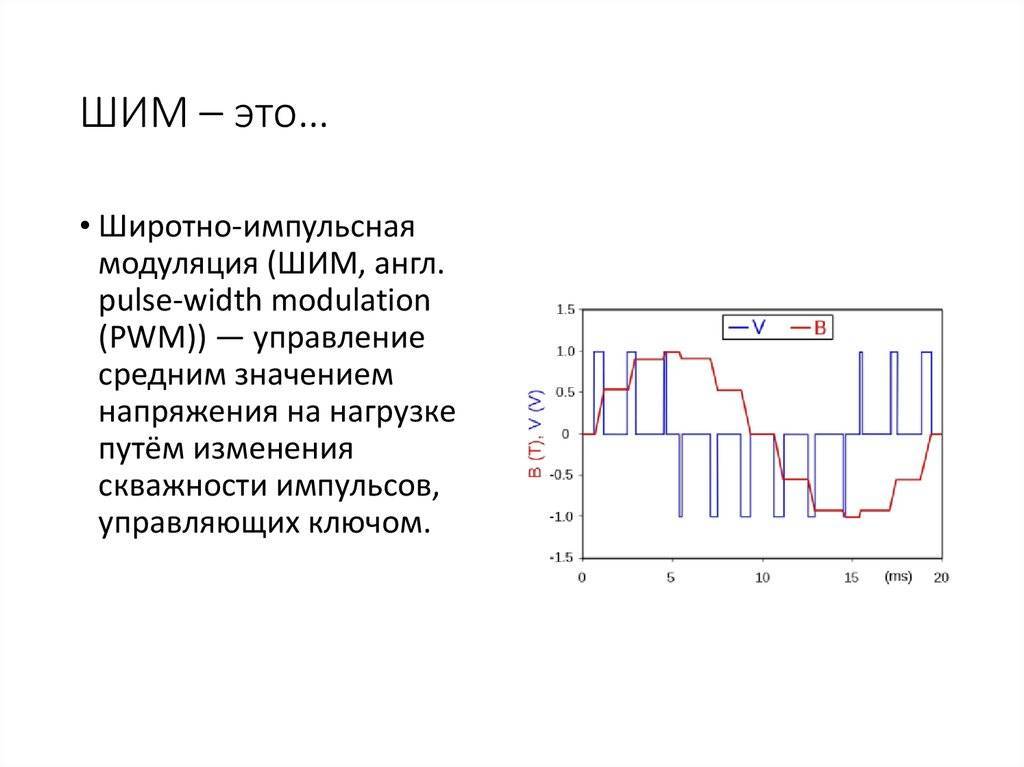
Что такое ШИМ сигнал
ШИМ – это сигнал с различными интервалами ON и OFF сигнала (различными продолжительностями включения). Время, в течение которого сигнал имеет высокий уровень, называется временем включения (“on time”), а время, в течение которого сигнал имеет низкий уровень — время выключения (“off time”). У ШИМ сигнала есть два параметра, которые мы рассмотрим далее.
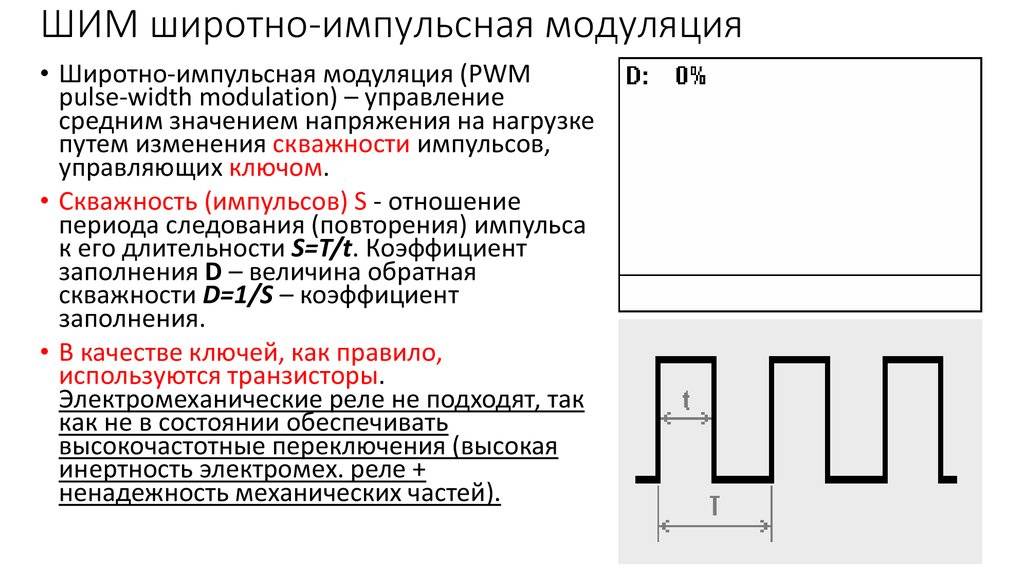
Коэффициент заполнения (скважность) ШИМ
Процент времени, в течение которого ШИМ сигнал имеет высокий уровень, называется коэффициентом заполнения (скважностью). К примеру, коэффициент заполнения ШИМ сигнала с периодом (длительностью) 100 мс, в котором в течение 50 мс сигнал имеет высокий уровень и в течение 50 мс имеет низкий уровень, равен 50%
Аналогично, если для такой же длительности (100 мс) сигнал 25 мс остается на высоком уровне и 75 мс на низком, то коэффициент заполнения для такого сигнала будет равен 25%. Для его определения нам необходимо знать только длительность высокого уровня сигнала (длительность низкого уровня легко определить как разность между периодом сигнала и длительность сигнала высокого уровня). Более наглядно ШИМ сигнал представлен на следующем рисунке.

Формула для расчета коэффициента заполнения/скважности (Duty Cycle) выглядит следующим образом:
Duty Cycle (%) = On Time/(On Time + Off Time)
Таким образом, изменяя коэффициент заполнения ШИМ сигнала мы можем изменять интенсивность свечения светодиода.
Выбор режима ШИМ
После выбора нужного нам коэффициента заполнения необходимо выбрать еще режим ШИМ – то есть то, каким образом ШИМ будет работать. Существует три типа ШИМ:
- Быстрая ШИМ (Fast PWM).
- ШИМ с коррекцией фазы (Phase Correct PWM).
- ШИМ с коррекцией фазы и частоты (Phase and Frequency Correct PWM).
Быстрая ШИМ используется в случаях когда нам не важна фаза импульсов, например, управление скоростью вращения двигателя или яркостью свечения светодиода.
Для генерации быстрой ШИМ нам необходимо будет запустить на таймере счет и когда он досчитает до определенного значения сбрасывать значение таймера снова в ноль. Таким образом мы установим период следования ШИМ импульсов. Таким образом мы можем контролировать импульс, устанавливая высокое значение сигнала когда счетчик таймера досчитает до определенного значения. А когда счетчик будет возвращаться в 0 на это время сигнал будет низкого уровня. Таким образом, мы имеем большую гибкость в управлении ШИМ сигналом используя всего лишь один таймер.
Почему болят глаза от экрана смартфона?
Некоторые владельцы телефонов задавались вопросом почему болит голова или появляется усталость глаз при долгом использовании устройства. Это связано с тем, что экран телефона постоянно мерцает.
Приведем пример дешевой лампы накаливания, создающей мерцание, заметное человеческим глазом. Постоянное угасание и вновь яркое свечение лампочки действительно сказывается на плохом самочувствии. Многие люди могли убедиться в этом самостоятельно.
Аналогичный процесс происходит с экраном смартфона. С тем лишь исключением, что частота мерцания у него гораздо выше, чем у обычной лампочки, и практически не замечается человеком. Мерцание экрана необходимо для управления интенсивностью свечения. Регулировка яркости на современных телефонах происходит двумя способами:
- Меняя уровень напряжения.
- Используя пульсацию света.
Первый способ при увеличении напряжения усиливает яркость, а при снижении, наоборот уменьшает. Для второго способа используется широтно-импульсная модуляция, о которой мы поговорим ниже.
Снизить нагрузку на глаза при долгом использовании смартфона, помогут следующие советы:
пользоваться компьютерными очками; делать перерывы через 20 минут; проводить гимнастику глаз и чаще моргать; пользоваться средствами для увлажнения (глазные капли/искусственная слеза); держать смартфон на расстоянии минимум 40 сантиметров; освещение в помещении должно быть хорошим; уделять внимание своей осанке
Что такое ШИМ и как работает
Задумываясь и о том, что такое ШИМ (или широтно-импульсная модуляция), сразу возникает ассоциация с шириной и импульсом. Она обеспечивает включение и выключение экрана на определенный промежуток времени.
Чем меньше яркость экрана — тем чаще будет происходить всплеск напряжения за ту же единицу времени (пример: 1 секунда).
Импульсом называется всплеск напряжения на заданном временном интервале. Он обладает определенной длинной, которую можно увеличить или уменьшить. Другими словами — контролировать его ширину. Импульсы могут посылаться через заданный временной интервал.
Например, светодиоды в дисплее телефона получают импульс с частотой 60 раз за 1 секунду. То есть каждый из них продолжается 0,017 секунды. Пока длиться импульс – светодиоды горят. Перестает – светодиоды гаснут.
Вернемся к такому понятию как яркость дисплея. Для ее изменения как раз и необходимо менять длительность импульса. Каждый новый импульс, из примера выше, появляется также с частотой 0,017 секунды. Но при этом светодиоды горят лишь половину из этого времени, то есть 0,008 секунды. Тем самым, сократив ширину в 2 раза, удастся снизить яркость на 50 %.
Воздействие на человека
Подсветка OLED-панелей не меняет своего уровня на протяжении всего периода использования. Но, яркость дисплеев регулируется ШИМом. Глаза человека устроены таким образом, что не замечают этого мерцания, так как частота широтно-импульсной модуляции у современных смартфонов высокая.
Современные смартфоны обладают частотой обновления экрана от 60 Герц. Для комфортного просмотра, зрительные рецепторы людей должны улавливать импульсы света с частотой до 300 раз в секунду. Поэтому, для некоторых людей низкая частота мерцания негативно сказывается на самочувствии. У них начинает болеть голова и появляется усталость глаз.
Интересно знать!Многие производители мобильных телефонов используют технологию ШИМ при достижении определенного уровня яркости. Так, устройства компании Apple, сперва снижают напряжение, которое делает дисплей менее ярким. Когда она станет равной 50 % — запускают ШИМ. После этого появляется мерцание и люди с повышенной чувствительностью глаз, замечают появление слабости, сухость глаз и другие недуги.
Почему один человек видит мерцание, а другой нет?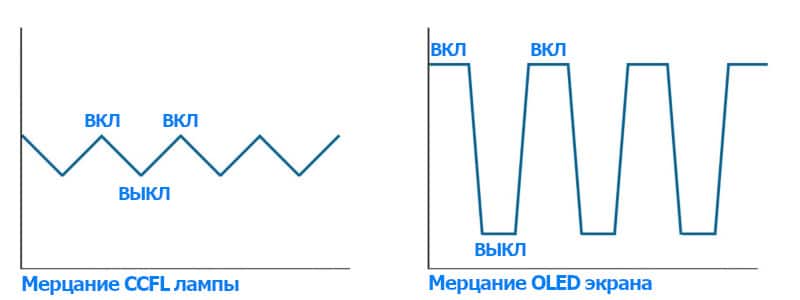
При включении светодиодов с большим временным интервалом, человеческий глаз естественно замечает, что какое-то время они не горят. Но если светодиод будет гореть и затухать 60 раз в секунду, то люди престают это замечать. Этот эффект называется порогом слияния мерцания.
Для большинства людей он равен 60, но встречаются и исключения. Так, например, пилоты и киберспортсмены, проводящие много времени за компьютерными играми, более восприимчивы к частоте мерцания света. Стоит отметить, что у собак порог слияния мерцания находится в диапазоне 70 – 80 раз в секунду. А у некоторых насекомых, это значение достигает 250.
Также, стоит отметить, что все люди видят мерцание по-разному. Но большинство не замечает ее при высокой яркости. Яркий экран избавлен от мерцания, но это сказывается на автономности устройства, так как тратиться больше электроэнергии.
Что меняет частоту сигнала ШИМ?
Выполнив практическое упражнение с диодом и конденсатором, вы могли собственными глазами увидеть, что более высокая частота повторения импульсов ШИМ полезна, потому что усреднение лучше. Так должны ли мы всегда использовать максимально возможную частоту?
Нет, потому что:
- каждое переключение порождает потери,
- некоторые потребители электроэнергии плохо реагируют на слишком высокую частоту.
К сожалению, первый пункт применим всегда. Это связано с тем, что переключение (т.е. выключение и включение) происходит не сразу. Ограничением являются свойства самих транзисторов, используемые для управления источником питания приемника.
| Раньше прямоугольный сигнал рисовался с острыми вертикальными краями, но на самом деле такую форму получить невозможно. |
Время, которое должно пройти во время изменения напряжения, не равно нулю. Ход спусков может быть самым разным. Чаще всего он напоминает прямую линию. Однако более внимательный анализ покажет наличие округлых фрагментов у основания и вершины такого «прямоугольника».
Напряжение, которым питается наш образец приемника, мы обозначили зеленым цветом. Здесь мы предположили, что наклоны линейные, т.е. форма импульса напряжения трапециевидная. Эта ситуация определенно преувеличена (длительное время переключения по сравнению со всем периодом), но она хорошо иллюстрирует данную картину.
 Внешний вид прямоугольного сигнала, который лучше отражает реальный сигнал
Внешний вид прямоугольного сигнала, который лучше отражает реальный сигнал
| Фактически, прямоугольный сигнал может быть еще более искаженным. Однако на данный момент, наиболее интересным является время нарастания и спада сигнала. |
Здесь стоит отметить, что каждая точка наклона напоминает ситуацию с ресивером и линейным стабилизатором — напряжение, которое не складывается на двигателе в данный момент, должно прикладываться к стабилизатору, создавая таким образом потери.
Здесь точно также, за исключением того, что распределение этих напряжений непостоянно (меняется при переключении). Красные треугольники показывают потери в результате того, что сумма напряжений на ключе и приемнике всегда должна быть равна напряжению питания.
 Завышенные коммутационные потери (отмечены красным)
Завышенные коммутационные потери (отмечены красным)
Один период прямоугольного сигнала в секунду требует две операции переключения (включения и выключения). Десять периодов, уже требуют двадцать переключений в секунду. Тысяча периодов — две тысячи и т.д.
| Взаимосвязь интуитивно понятна: чем чаще приходится переключаться, тем больше потери. |
Помните, что частота и время переключения (нарастание или спад) не зависят друг от друга: мы можем влиять на частоту, например, написав подходящую программу для микроконтроллера. В свою очередь, последний параметр имеет небольшое влияние и является результатом электрических свойств схемы.
Итак, у нас есть два противоположных мнения. Во-первых, частота должна быть как можно более высокой из-за эффекта усреднения. Во-вторых, вы должны минимизировать потери, и тем самым снизить частоту до минимума. Искусство проектирования схем — это умение идти на компромиссы. Таким образом, мы должны выбрать такую частоту, чтобы, с одной стороны, получить стабильное среднее значение, а с другой — оставаться на приемлемом уровне потерь мощности.
Увеличение частоты и разрядности ШИМ Ардуино
Для изменения частоты ШИМа Ардуино в большую сторону необходимо обратиться к следующей инструкции.
Когда высокочастотный ШИМ-сигнал фильтруется, его небольшой компонент всегда будет проходить через фильтр. Это происходит потому, что конденсатор слишком мал, чтобы полностью его фильтровать. Можно было бы выбрать большую комбинацию конденсаторов и резисторов, но тогда потребуется долгое время для достижения надлежащего выходного напряжения при зарядке конденсатора.
Это значительно ограничило бы то, как быстро сигнал может измениться и быть видимым на выходе. Поэтому нужно выбрать разумное значение напряжения пульсации. Популярным приложением было бы изменение напряжения MOSFET. Поскольку МОП-транзисторы являются устройствами, контролирующими напряжение, можно легко управлять ими с помощью нашего микроконтроллера с ШИМ и фильтром нижних частот. На выходе будет присутствовать любое пульсационное напряжение, присутствующее на входе.
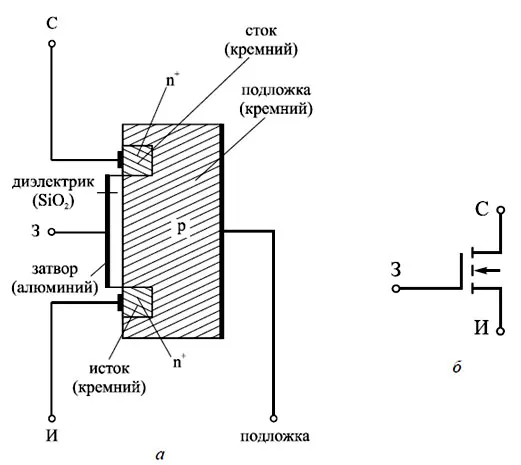 Рис.: а) структура МОП ПТ с индуцированным каналом. б) графическое изображение.
Рис.: а) структура МОП ПТ с индуцированным каналом. б) графическое изображение.
В этом примере предположим, что MOSFET будет управлять не критической нагрузкой, такой, как светодиод высокой мощности. В этом случае нам просто нужно оставаться в разумных пределах, поэтому пиковый ток в светодиоде не будет превышен. В этом случае пульсация в 0,1 вольта была бы более чем достаточной.