Библиотека Servo
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода.
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Управление осуществляется следующими функциями:
- attach() — присоединяет объект к конкретному выводу платы. Возможны два варианта синтаксиса для этой функции: servo.attach(pin) и servo.attach(pin, min, max). При этом pin — номер пина, к которому присоединяют сервопривод, min и max — длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно. Возвращаемого значения нет.
- write() — отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис: servo.write(angle), где angle — угол, на который должен повернуться сервопривод
- writeMicroseconds() — отдаёт команду послать на сервопривод имульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: servo.writeMicroseconds(uS), где uS — длина импульса в микросекундах. Возвращаемого значения нет.
- read() — читает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read(), возвращается целое значение от 0 до 180
- attached() — проверка, была ли присоединён объект к конкретному пину. Синтаксис следующий: servo.attached(), возвращается логическая истина, если объект была присоединён к какому-либо пину, или ложь в обратном случае
- detach() — производит действие, обратное действию attach(), то есть отсоединяет объект от пина, к которому был приписан. Синтаксис: servo.detach()
В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
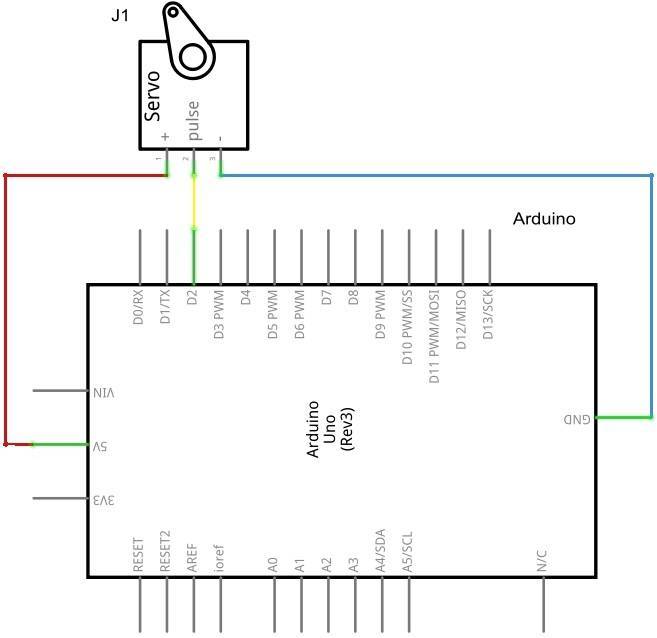
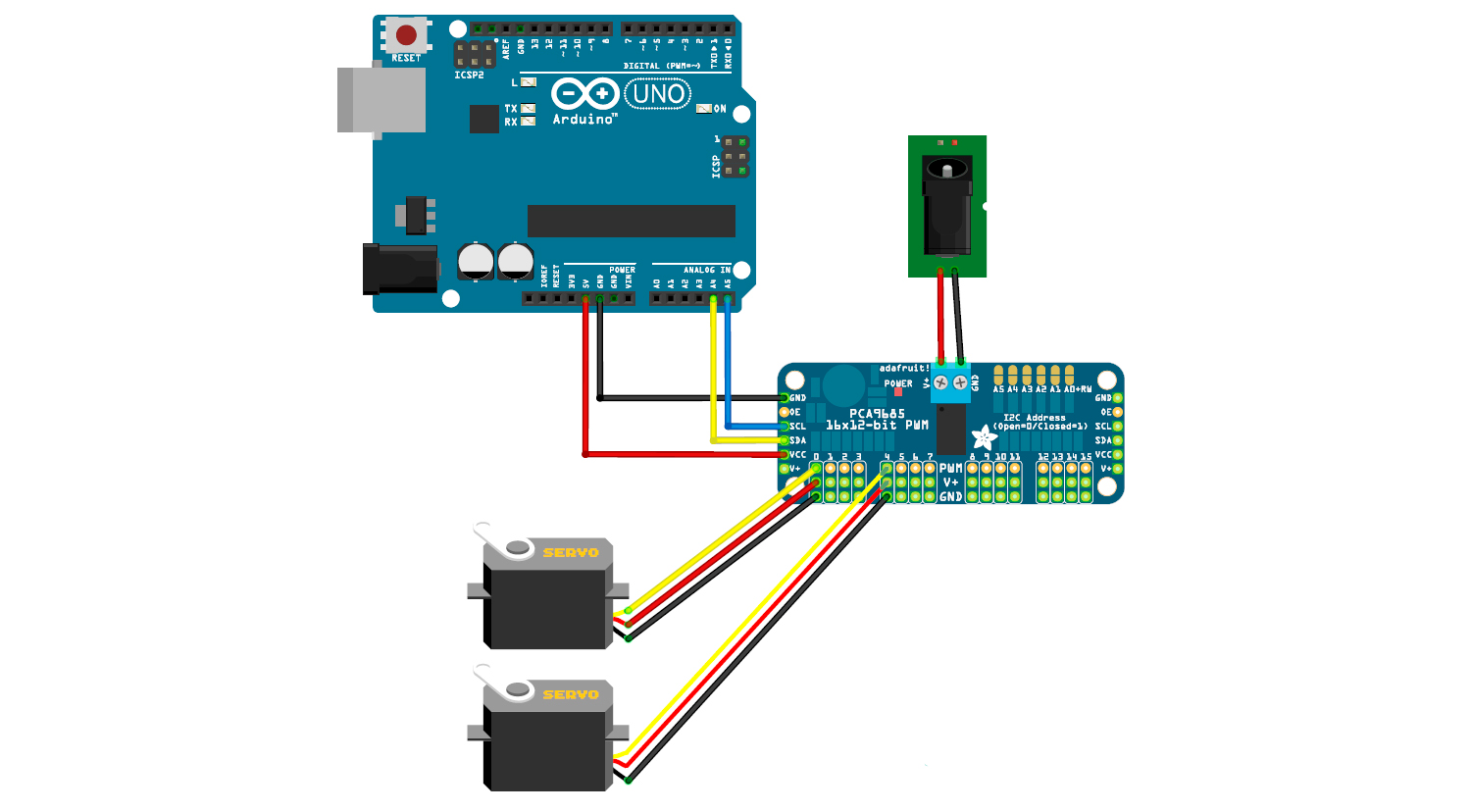
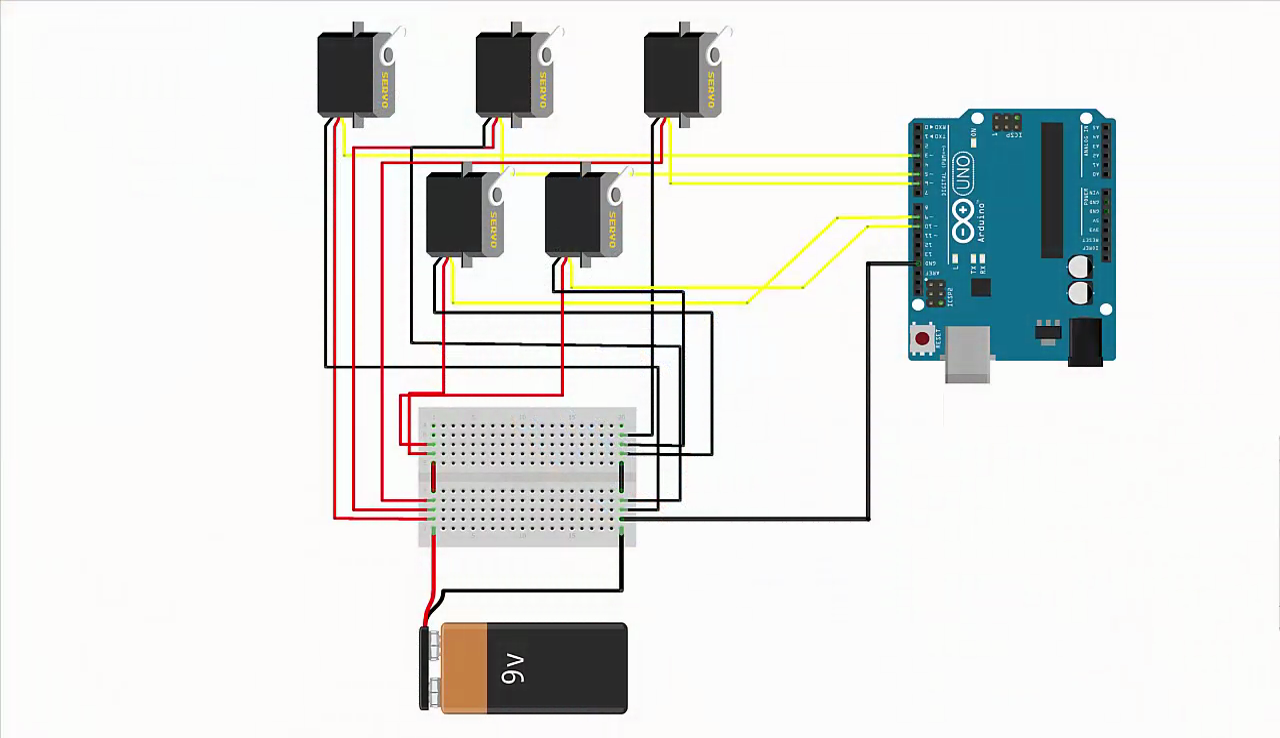
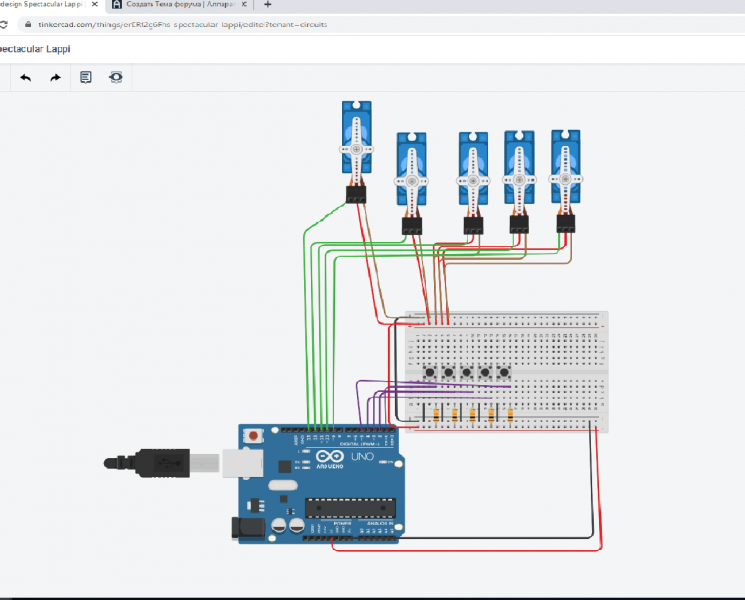
Пример подключения двух сервоприводов.
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц, так как они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2. Все методы библиотеки Servo2 совпадают с методами Servo.
При работе с сервоприводами на 360 градусов функции работают по другому.
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Среднее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
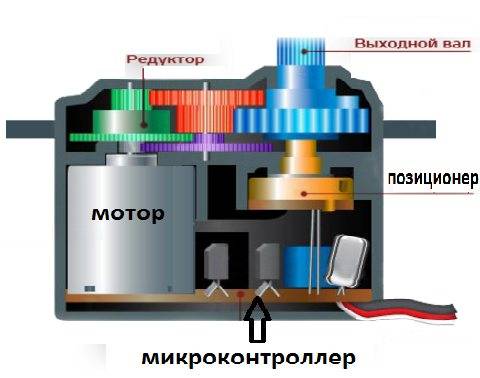
Управление сервоприводом
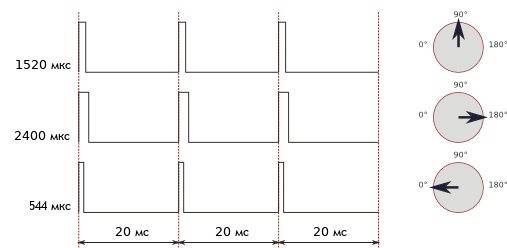
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной. Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
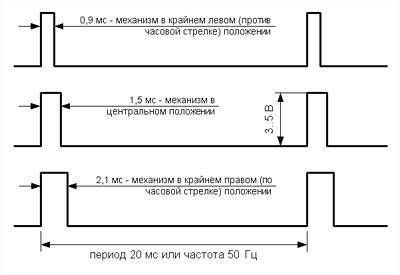
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс
Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
How does a servo motor work?
A standard hobby servo typically consists of a small electric motor, a potentiometer, control electronics, and a gearbox. The position of the output shaft is constantly measured by the internal potentiometer and compared with the target position set by the controller (e.g. the Arduino).
According to the error, the control electronics adjust the actual position of the output shaft so that it matches the target position. This is known as a closed-loop control system.
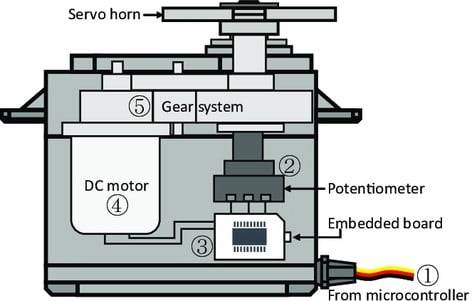
Schematic of an RC servo motor (Hwang et al. 2018)
The gearbox decreases the speed of the motor, which increases the torque at the output shaft. The maximum speed of the output shaft is usually around 60 RPM.
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Модель для печки
Сервопривод печки в среднем мощность имеет на уроне 2 кВт. Двигатели чаще всего устанавливаются асинхронного типа с предельной частотой на отметке в 31 Гц. Отличительной особенностью таких устройств принято считать наличие резистивного элемента. В его обязанности входит повышение пропускной способности модели. Редукторы чаще всего устанавливаются низкочастотного типа. Дополнительно следует отметить, что на рынке представлено множество модификаций с потенциометрами.
Управленческие платы, как правило, имеются серии РР20. Для многофункционального контроля печки они подходят идеально. В данной ситуации выходные валы подсоединяются напрямую к коробке редуктора. Все это необходимо для того, чтобы повысить крутящий момент. В качестве рычага производители используют плечо. Устанавливается оно, как правило, не большого размера. Подключается сервопривод печки к сети через специальные контакты на конвертере. В данном случае статор к устройству подсоединять можно. Дополнительно сервопривод отлично способен выполнять функции усилителя.
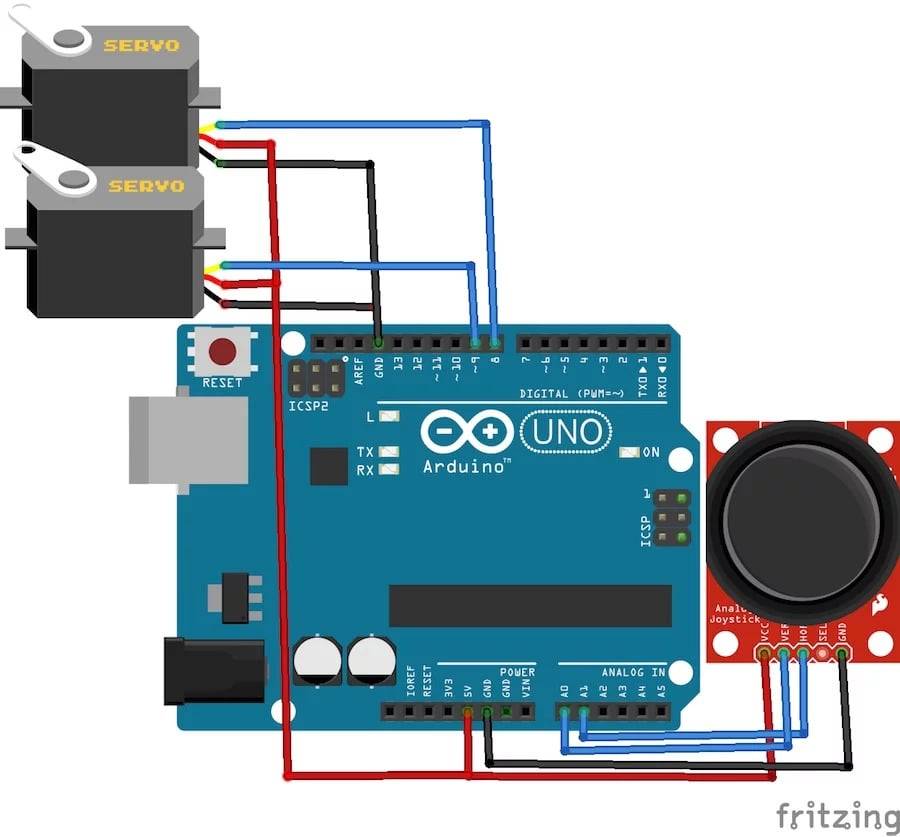
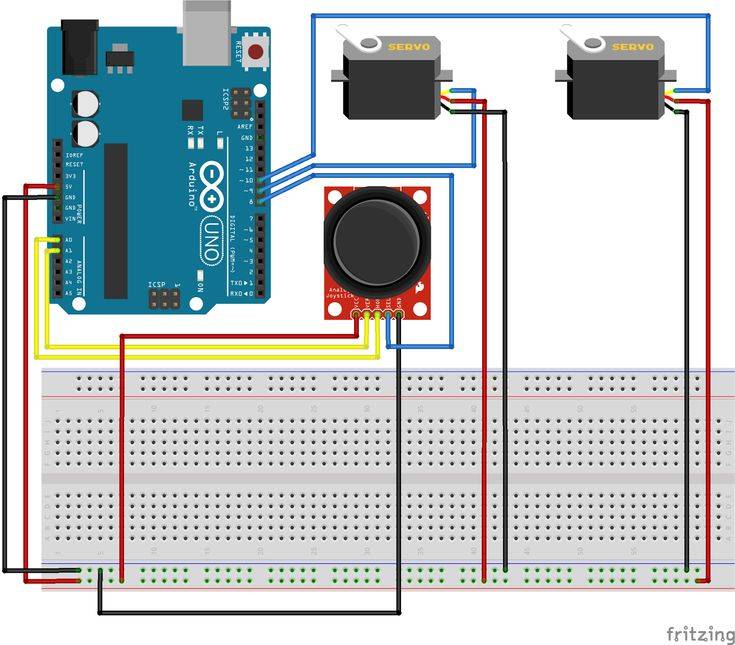
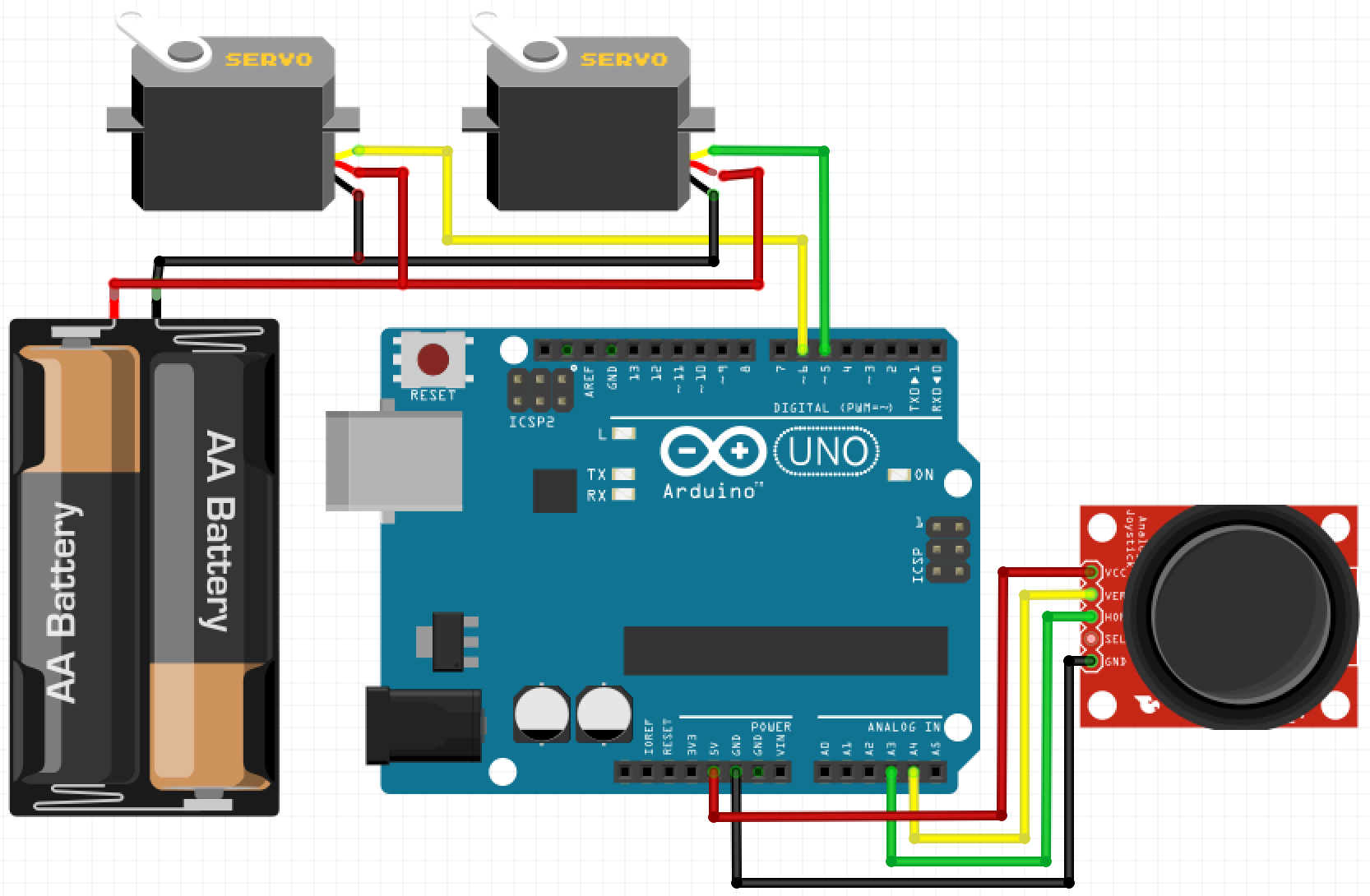
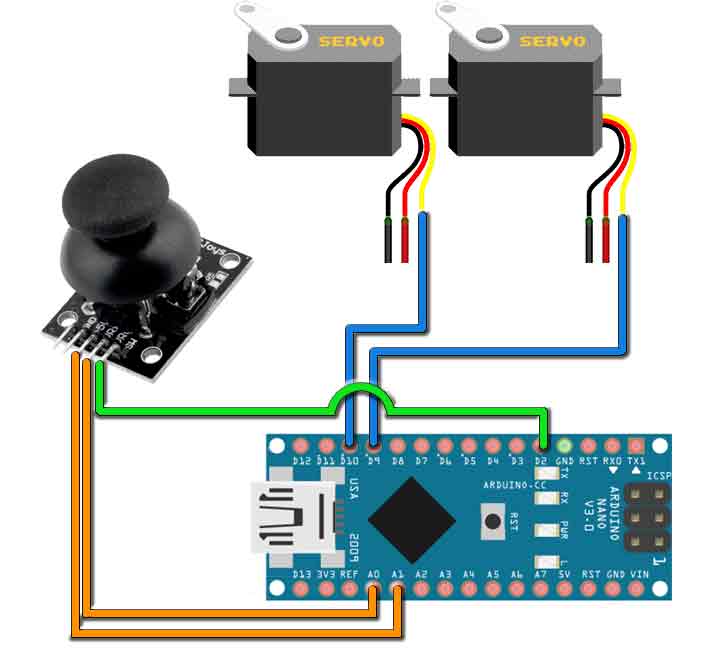
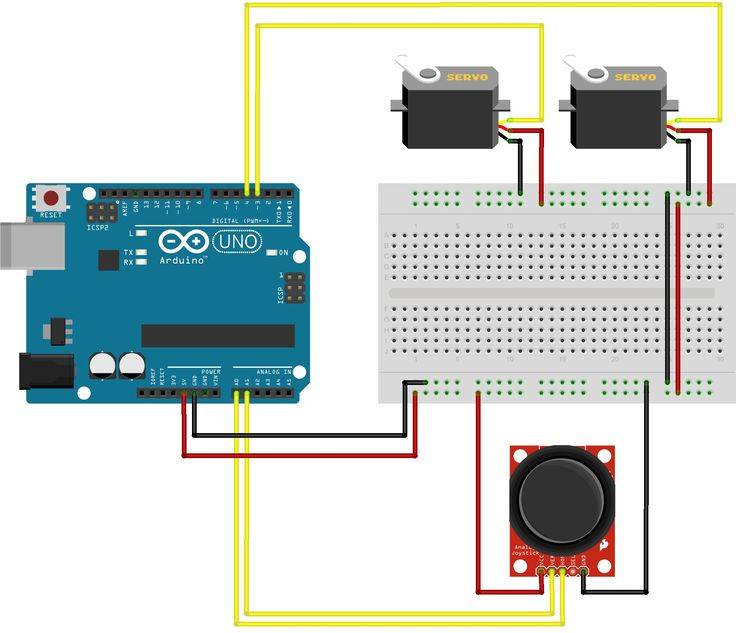
Подключаем джойстик
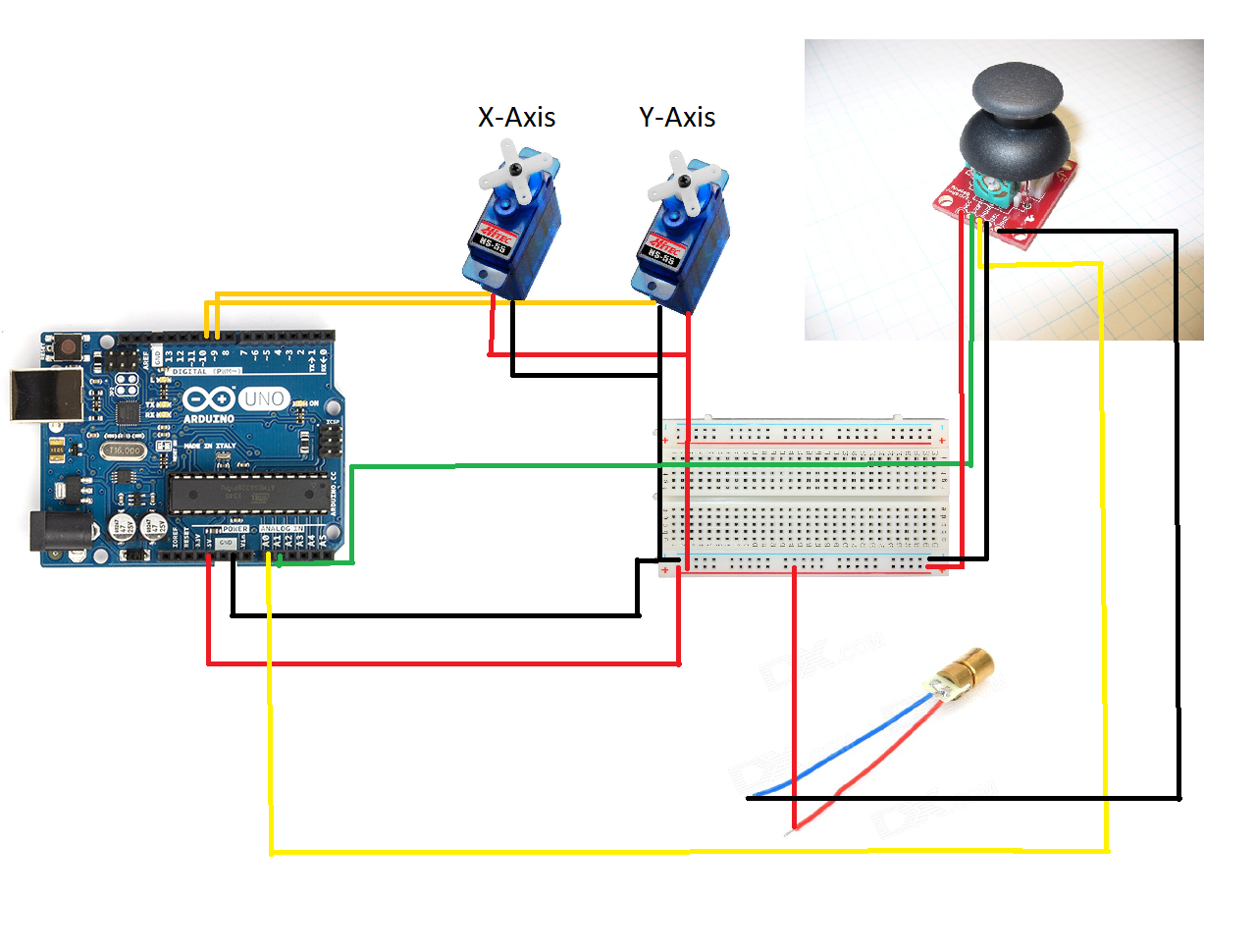
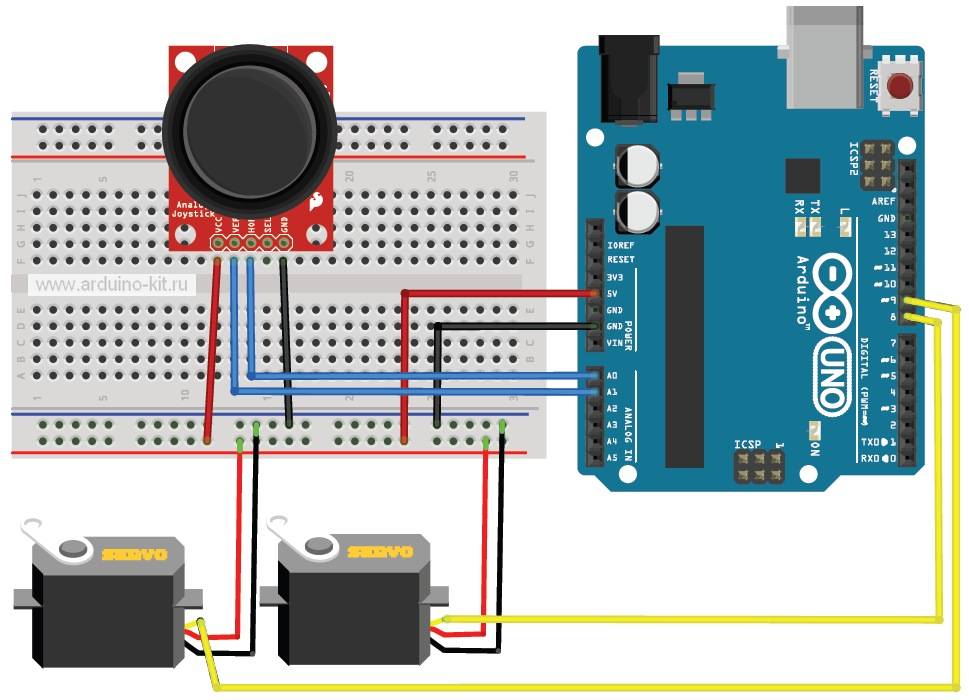
Представленная на рисунке ниже схема подключения может вас немного смутить. Но поверьте, все не так сложно как кажется на первый взгляд. Опять таки для подключения используем монтажную плату.
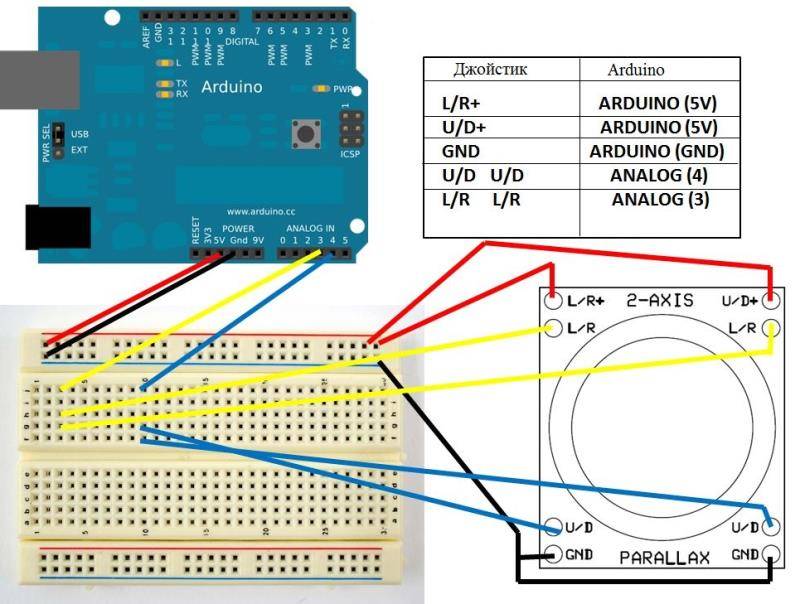
1. На модуле джойстика один выход U/R+ и один L/R+. Это выходы для подключения питания. Эти выходы подключаются к пину 5V на Arduino.
2. Также есть два разъема L/R и два разъема U/D. Они подключаются к аналоговым входам А3 и А4.
3. Земля на джойстике подключается к земле на Arduino.
Не забудьте перепроверить подключение. Помните, что большинство ошибок в проектах возникает именно из-за неправильного подключения. Особенно если вы используете монтажную плату, которая обрастает кучей коннекторов.
Дополнительные примеры скетчей
Следующий код позволяет вам контролировать серводвигатель на пине 2 с помощью потенциометра на аналоговом 0.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(2); // attaches the servo on pin 2 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
SoftwareServo::refresh();
}Следующий код – это поворот (пинг/понг) на выводе A0 с переменной скоростью.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
#define pinServo A0
int speed = 1;
int limits = {30,150}; // set limitations (min/max: 0->180)
boolean refresh = false; // toggle refresh on/off
void setup()
{
Serial.begin(9600);
// attaches the servo on pin to the servo object
myservo.attach(pinServo);
// init angle of servo inbetween two limitations
myservo.write((limits-limits)/2);
}
void loop()
{
// refresh angle
int angle = myservo.read();
// change direction when limits
if (angle >= limits || angle <= limits) speed = -speed;
myservo.write(angle + speed);
// set refresh one time / 2
refresh = refresh ? false : true;
if (refresh) SoftwareServo::refresh();
Serial.print("Angle: ");
Serial.println(angle);
}Процесс рекуперации
Зачастую запускается при переключении режимов работы сервомотора: что это такое? Это возвратная энергия, которая выделяется при смене знака (направления движения) относительно вращающего момента. Обычно она не слишком большая, но все равно собирается на конденсаторах, увеличивая, таким образом, напряжение на звене постоянного тока.
В тех же случаях, когда данное неравенство абсолютных значений достигнет серьезной отметки, пороговый уровень емкости шины будет пробит. И тогда все излишки будут сброшены в тормозной резистор.
Мы постарались рассмотреть все особенности данных механизмов и подчеркнуть удобство и перспективность их использования. Предлагаем также взглянуть на схемы сервоприводов, фото и видеоролики на эту тему – чтобы вы могли дополнить свое представление.
Источник
Перейдём к практике
В наборе, который мы с вами распаковывали ранее мне достался сервопривод Tower Pro SG90 — это одна из популярнейших моделей для хобби, поэтому китайцы кладут их во все подобные наборы. Отдельно он стоит 3-4 доллара.
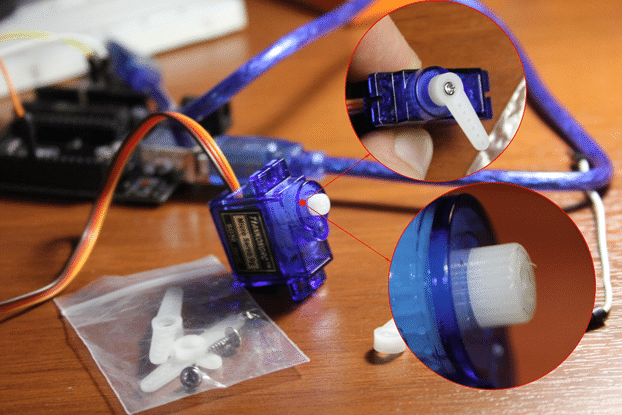
При всей своей миниатюрности, SG90 достаточно «сильный» и момент на валу аж 1.8 кг/см.
В комплекте с ним есть набор креплений для соединения с механизмами: четырёхсторонний (в виде +), двухсторонний (в виде —) один односторонний, что вы можете наблюдать на фото выше. Кроме них в комплект всегда кладут крепежные винтики. На валу есть шлицы для крепления оснастки, чтобы она не проворачивалась.
Сегодня нам понадобится:
Сервопривод SG90 — 1 штука;
Плата Arduino, любая, у меня есть UNO — 1 штука;
Перемычки или провода для содинения — 5-10 штук;
Потенциометр, например, на 10К (на самом деле его сопротивление не слишком важно) — 1 штука.
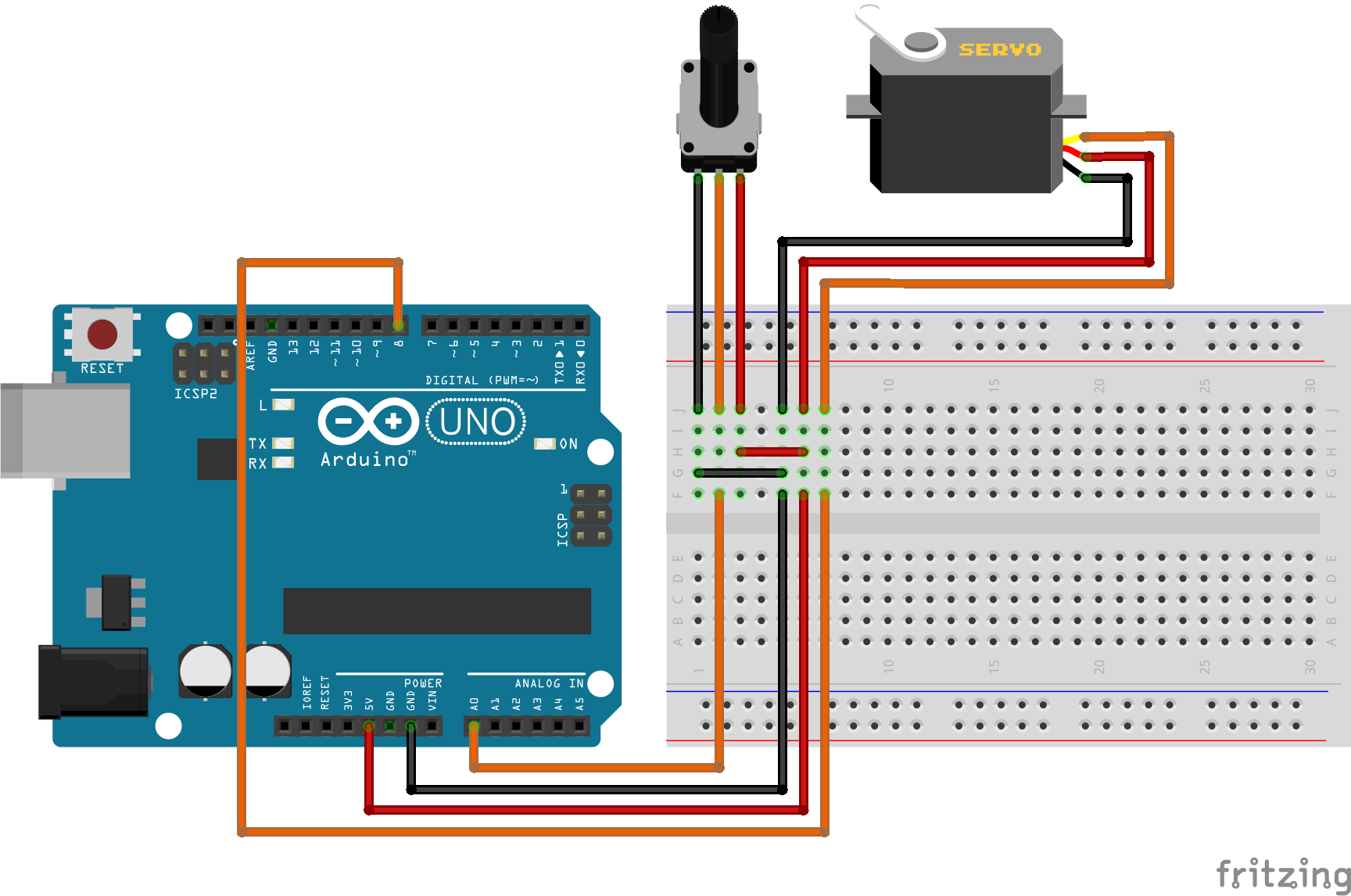
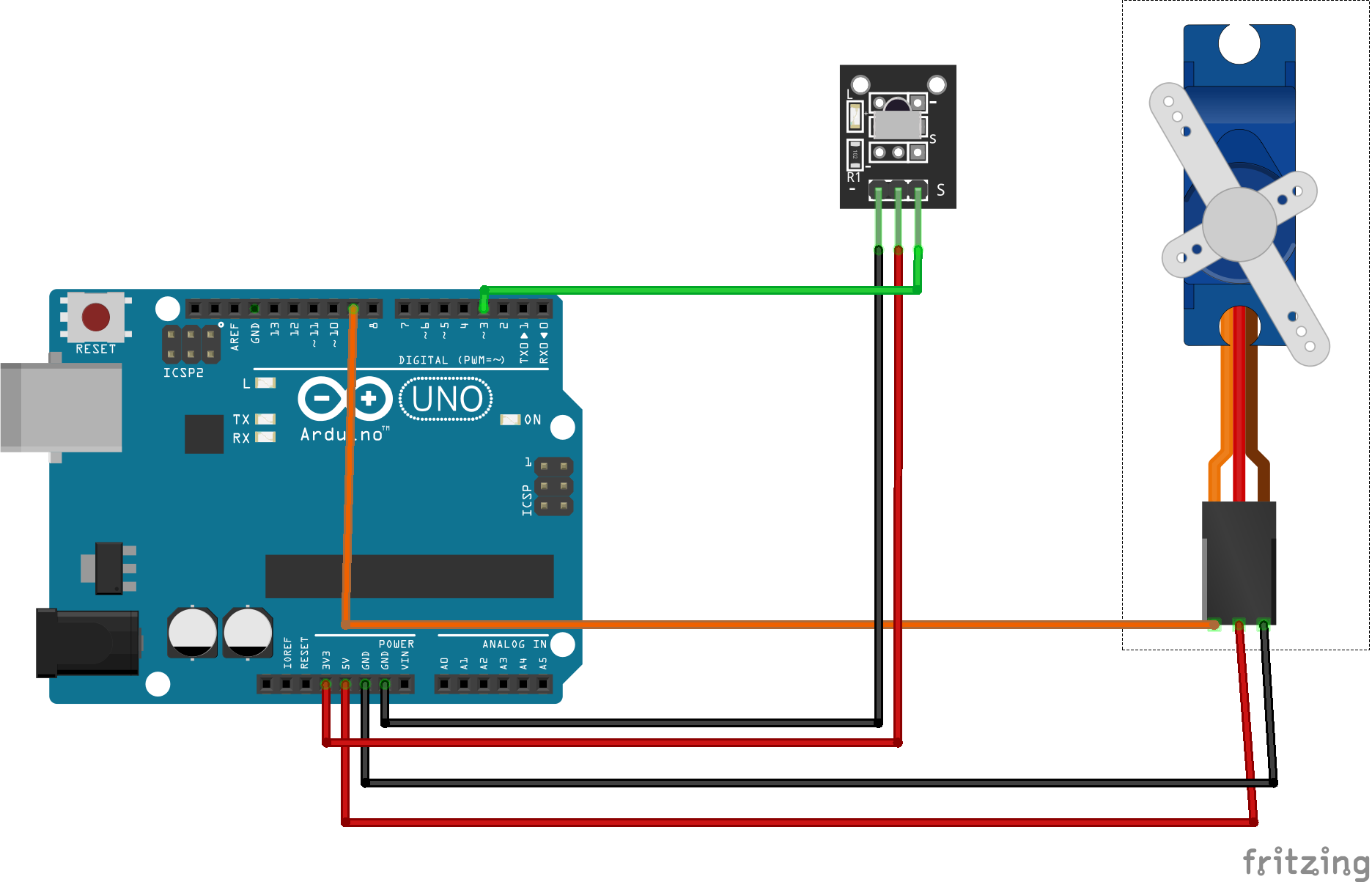
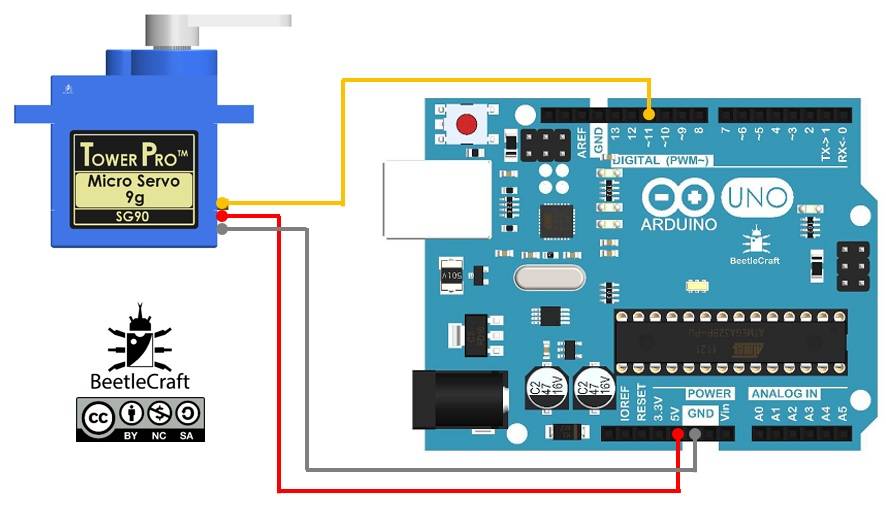
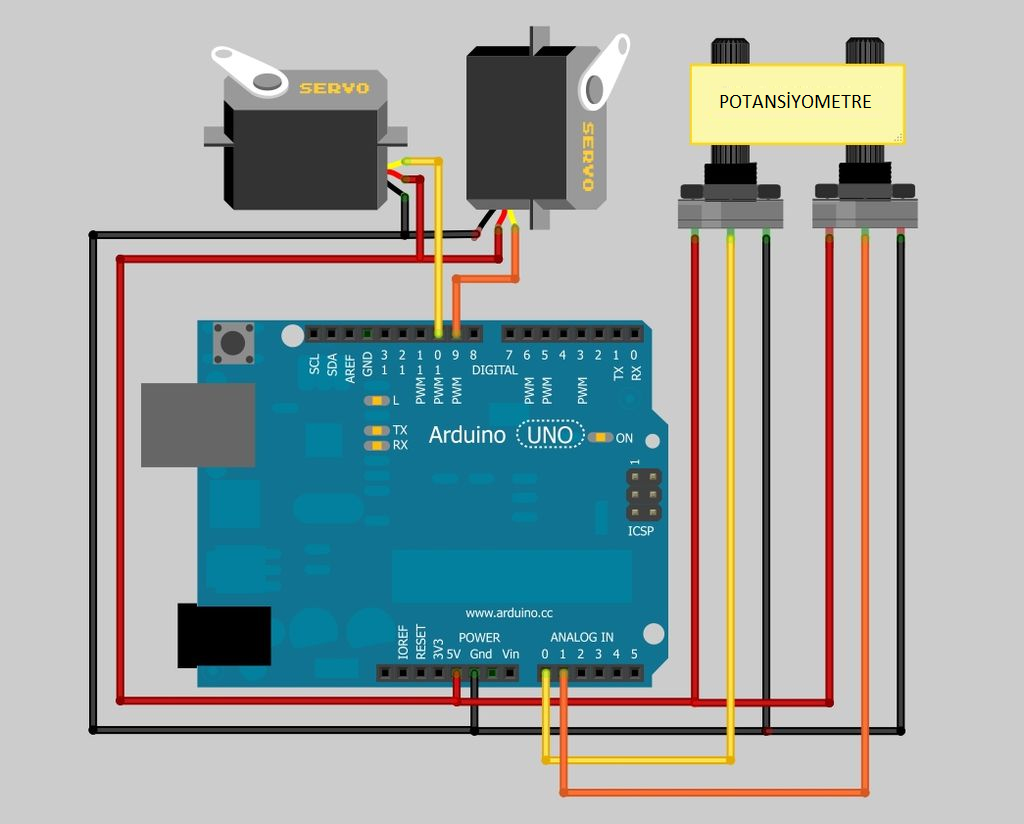
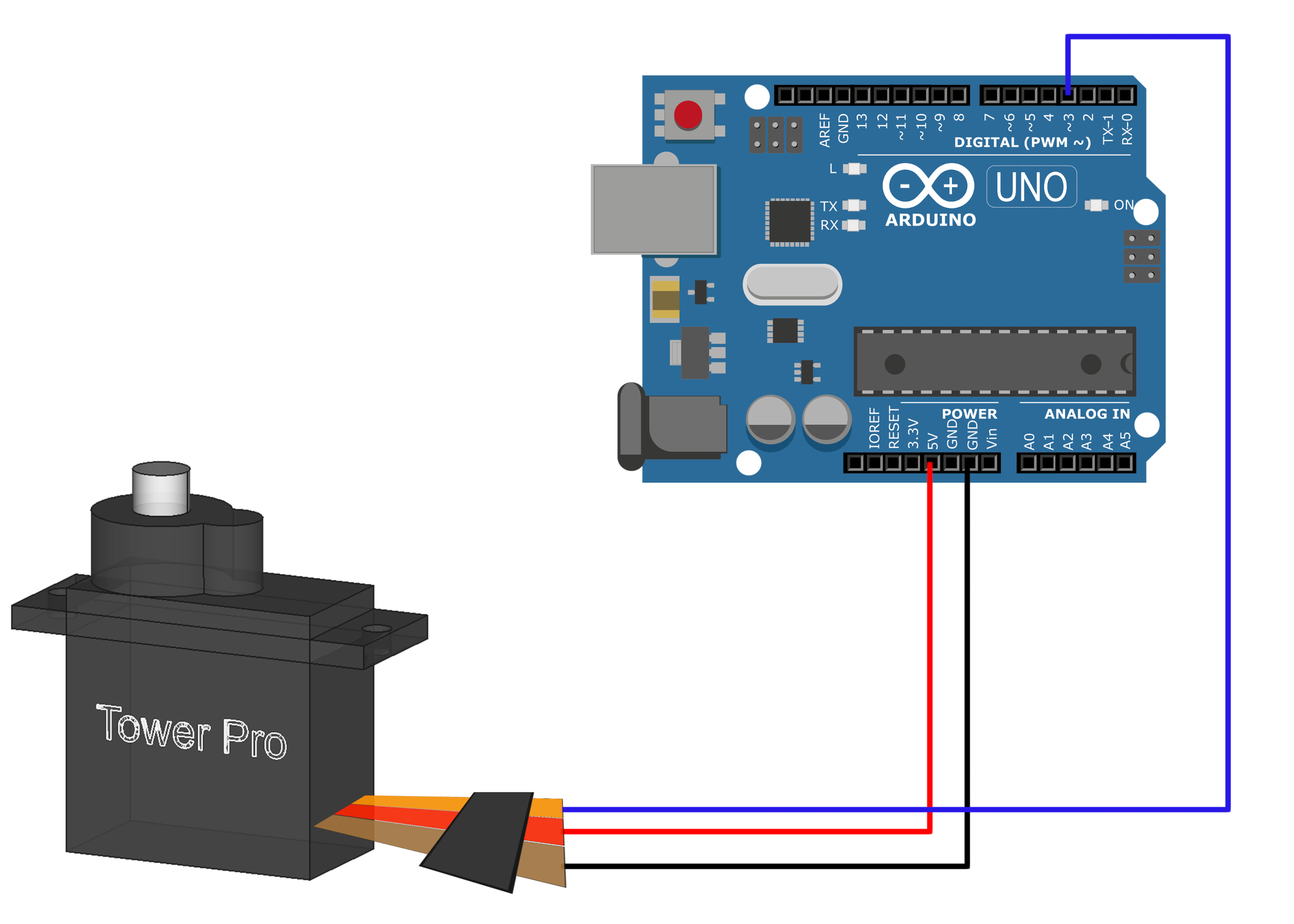
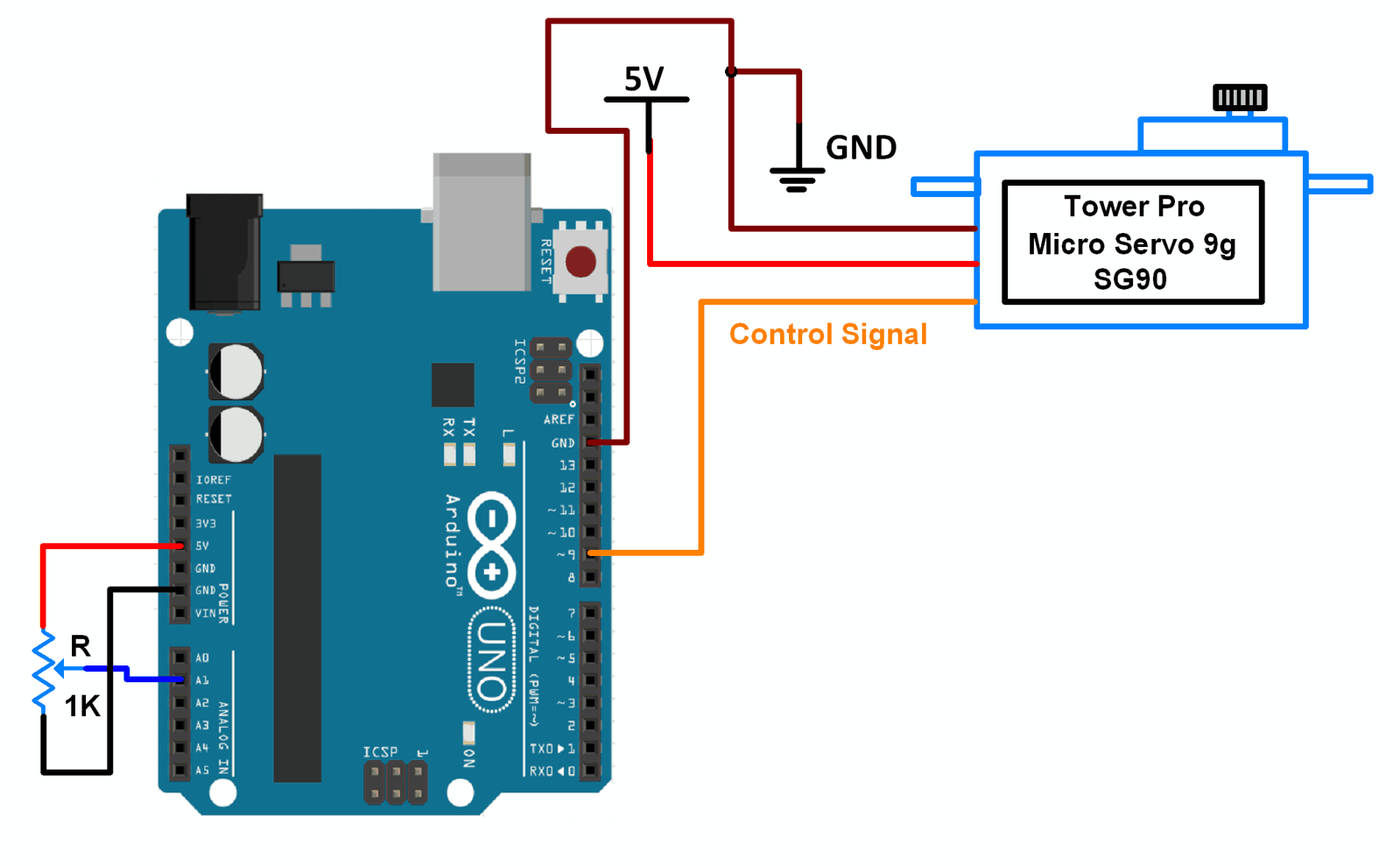
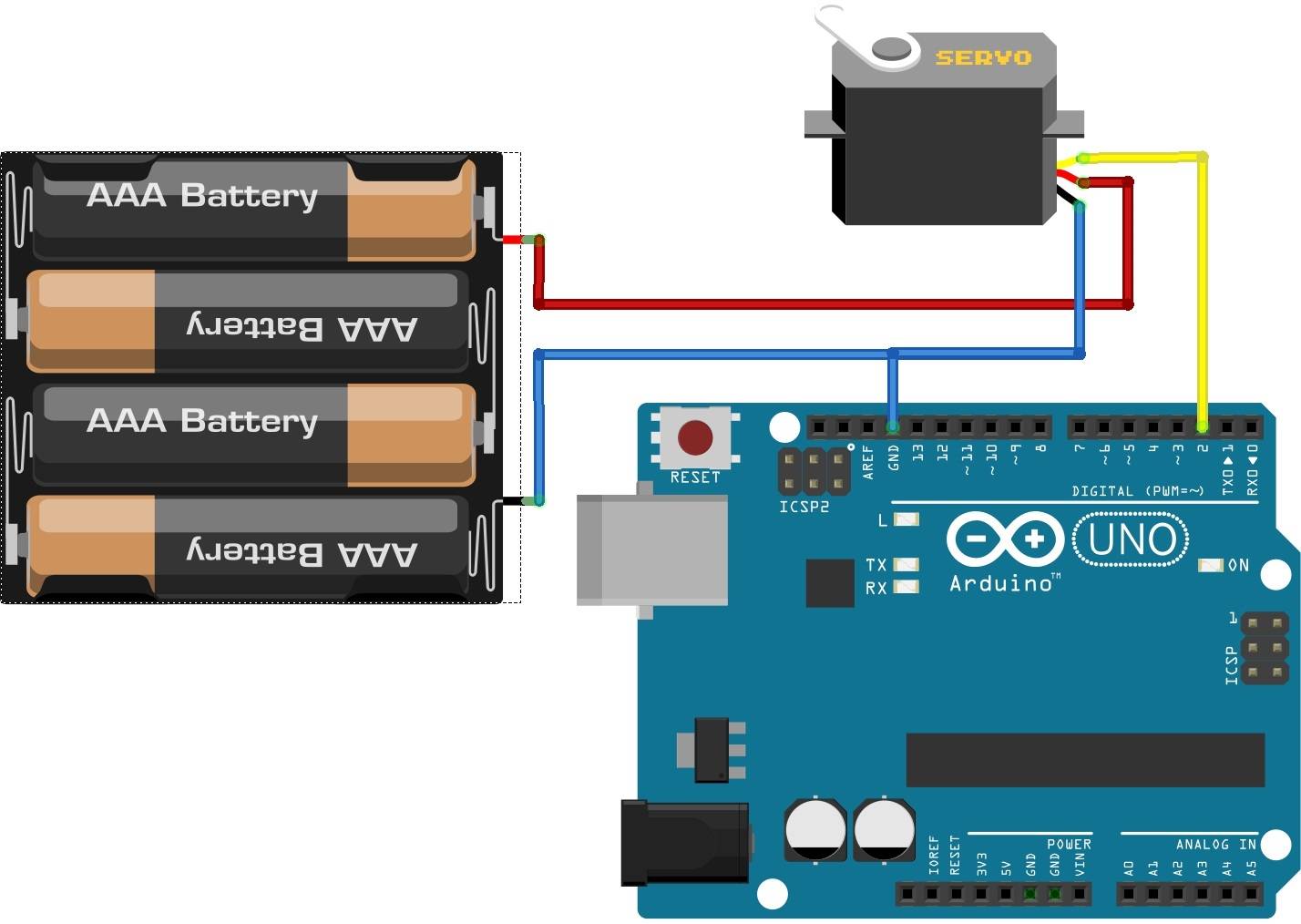
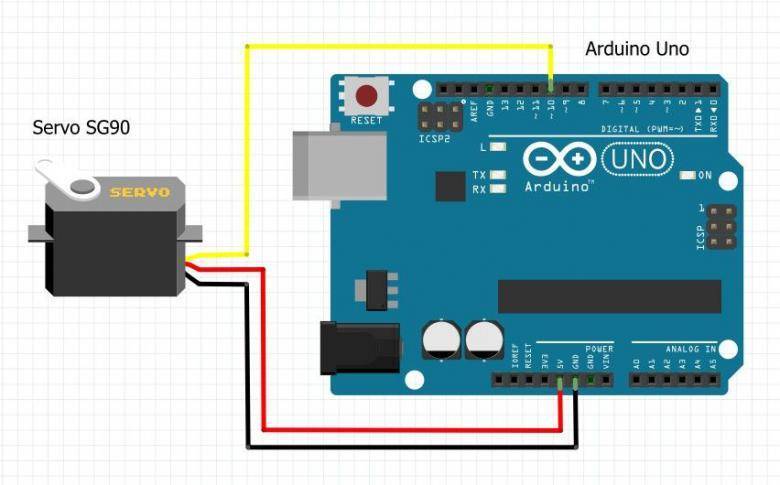
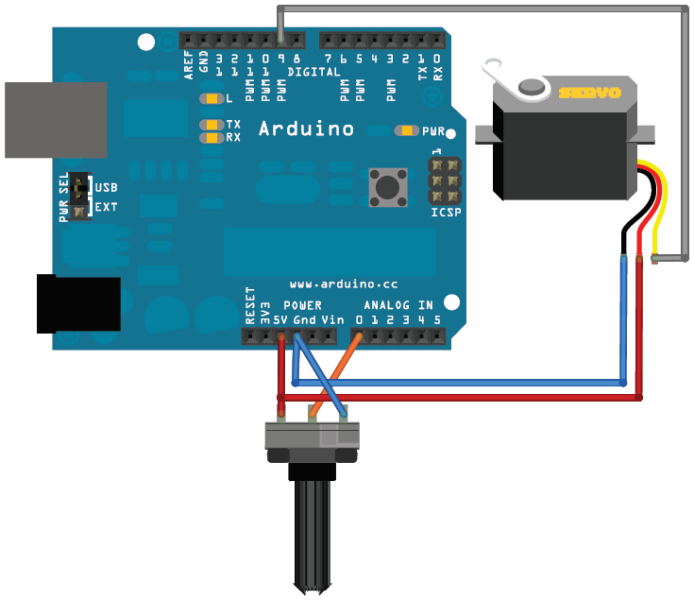
Если вы будете питать серву напрямую от платы, то подключайте её к пинам 5V красным проводом, GND – коричневым (черным) проводом, а жёлтый провод — это сигнал, его можно к любому пину, хоть цифровому, хоть аналоговому, хоть с ШИМ, хоть без него.
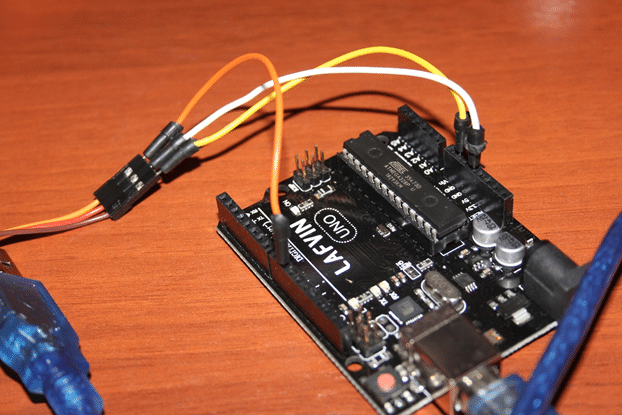
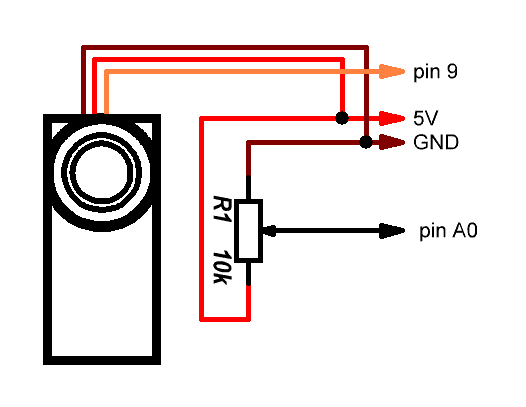
Я же заблаговременно собрал схему на макетной плате и подключил к ней потенциометр, которым мы далее будем задавать положение вала. Средний вывод потенциометра я подключил к аналоговому пину A0 ардуино, а сигнальный провод сервопривода – к 9 пину. Схему приведу ниже.
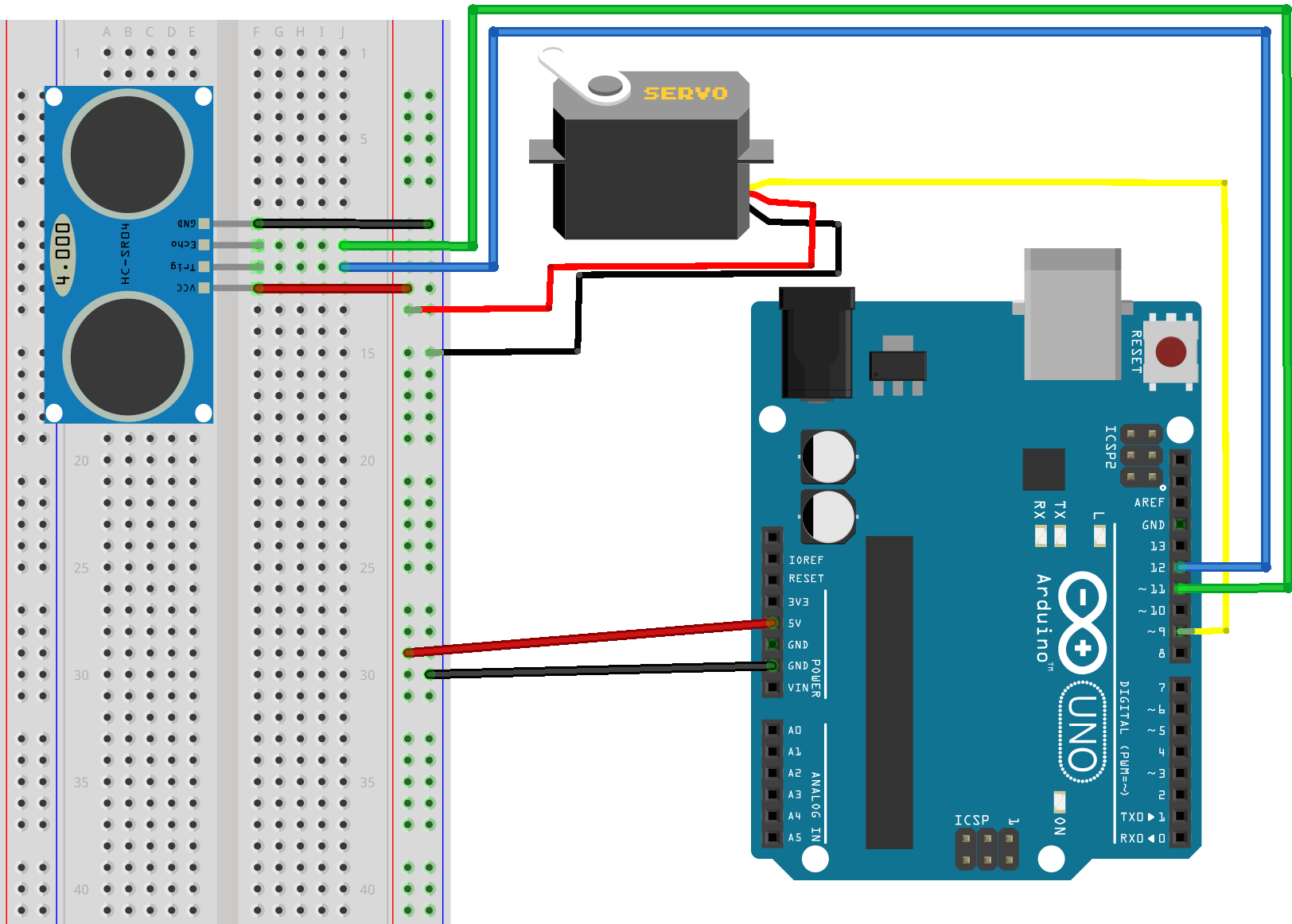
Проверяем работоспособность сервопривода, для этого заходим в Arduino IDE, открываем пример из стандартного набора под названием «Servo→Sweep»
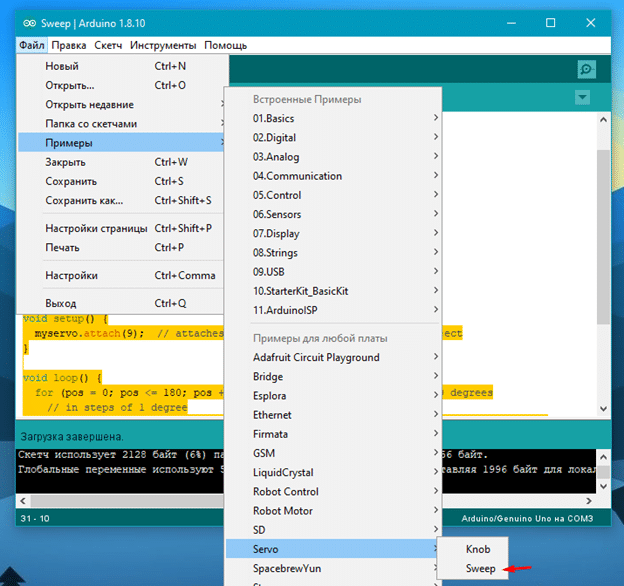
По умолчанию в этом примере выставлено, что сигнальный провод подключается к 9-му пину, если вы подключили к другому – исправьте вот это значение в коде:
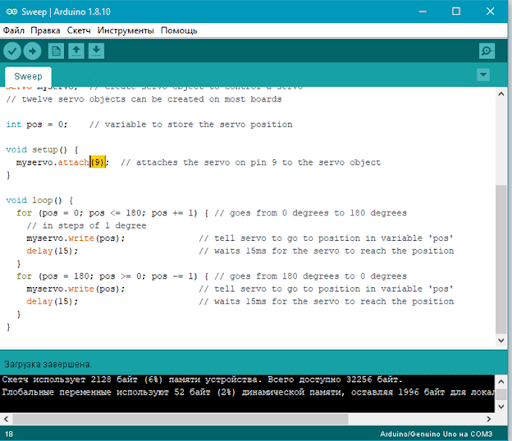
Код несложный, привожу его ниже с русскими комментариями.
// Можно создать до 12 таких объектов и подключить столько же приводов
//для объекта myservo подключен к 9 пину
// чтобы привод повернулся на угол, указанный в pos
В результате сервопривод вращается от одного крайнего положения до другого. Скорость перемещения можно изменять либо путем изменения задержки между шагами (delay), либо путем изменения шага, а именно правкой последнего значения в аргументах цикла — for (pos = 180; pos >= 0; pos -= 1). На видео я показал примеры с разными значениями задержки.
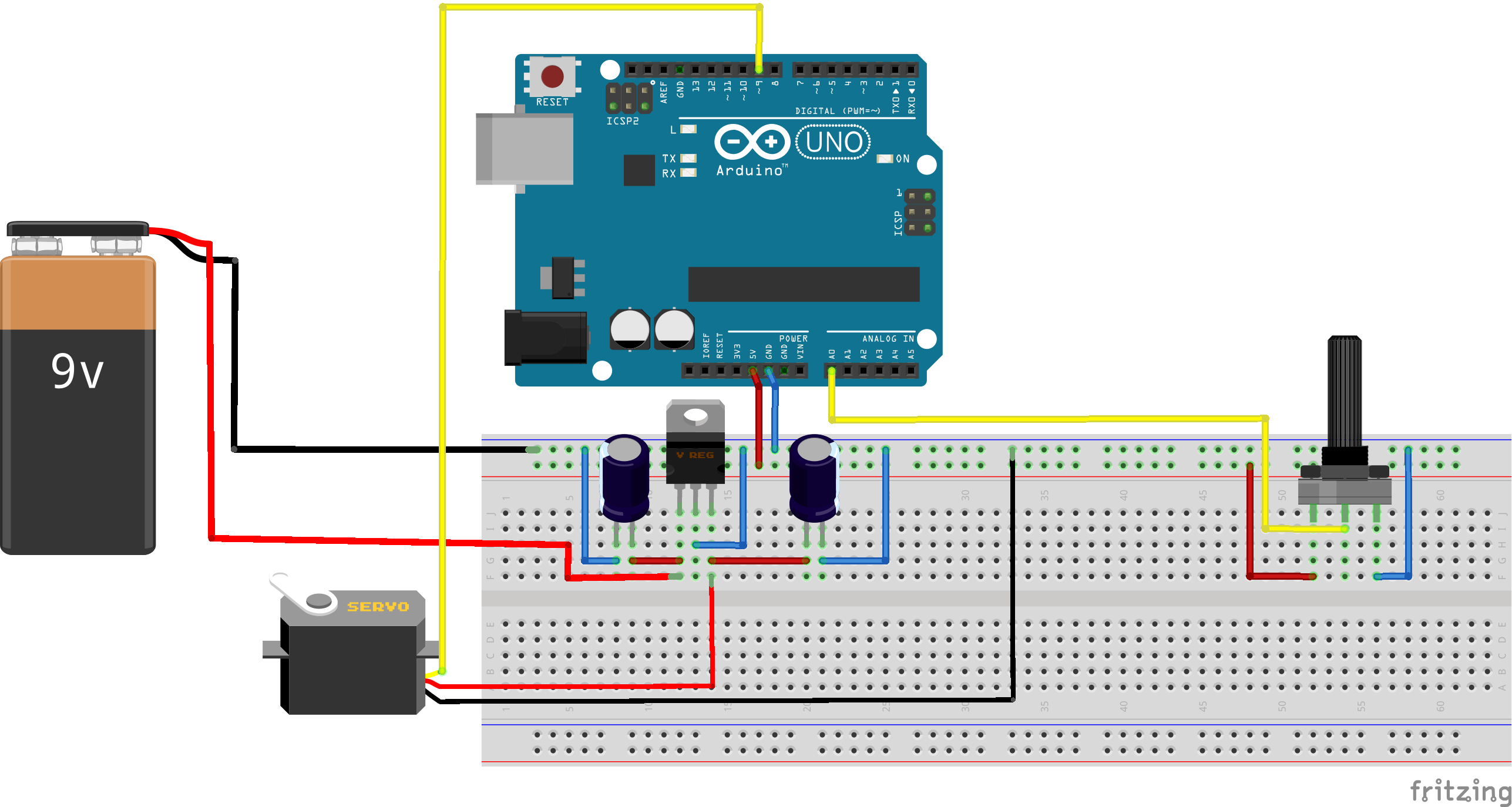
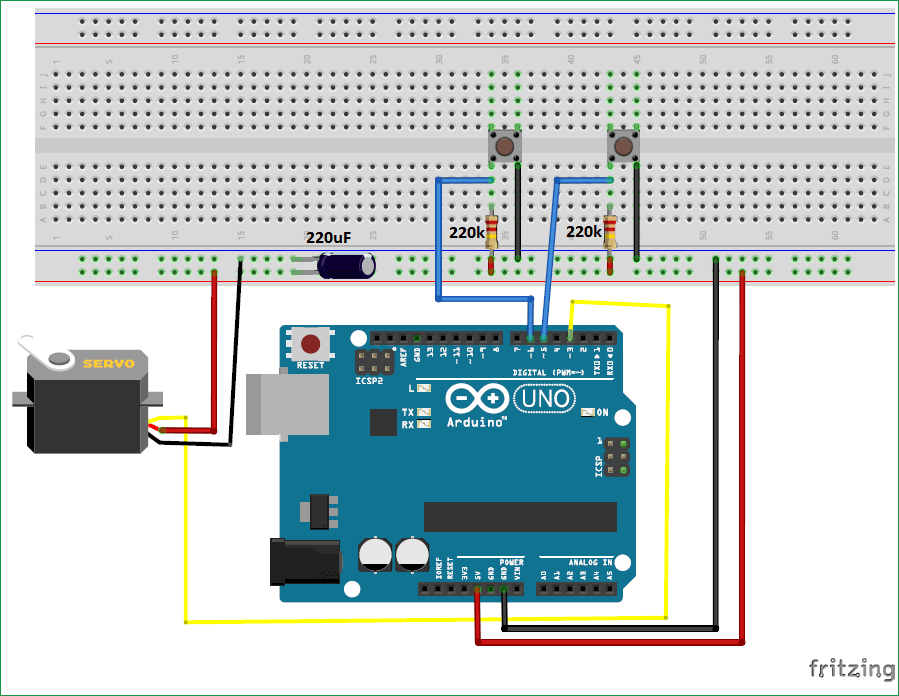
Дальше мы откроем другой из стандартных примеров — knob. Здесь-то нам и понадобится потенциометр. Ниже приведена схема подключения для этого примера.
Разберем код. Первая его часть, где подключается библиотека и назначается пин, к которому подключен управляющий провод сервопривода не изменилась, и её я комментировать не буду.
// к которому подключено потенциометр (пин А0)
// до необходимых нам градусов — от 0 до 180
// значениями, полученными с аналогового входа
Библиотека Servo.h по умолчанию встроена в Arduino IDE, разберем основные её команды:
Servo myservo – вместо «myservo» может быть любое слово, это название вашего сервопривода.
attach() — привязать переменную, объявленную предыдущей командой к пину. Пример использования ИмяПривода.attach(9) – расшифровывается так: “сервопривод с названием «ИмяПривода» подключен к пину 9”.
Если у вашего привода длины управляющих импульсов отличаются от стандартных 544 и 2400 мкс, то их можно задать через запятую после номера пина, вот так servo.attach(pin, min, max), где servo – имя привода (имя переменной типа Servo), min – длина сигнала для минимального угла поворота (0°) в микросекундах, max – ширина импульса управляющего сигнала для максимального угла поворота (180°) в микросекундах.
write() — передаём приводу угол поворота в градусах (пример: ИмяПривода.write(180))
writeMicroseconds() — тоже самое, только указывает на длину сигнала в микросекундах.
read() — определяет текущее положение вала;
attached() — Проверяет подключена ли переменная типа Servo к пину с сервоприводом. Синтаксис — Servo.attached().
detach() — отмена команды attach, то есть отсоединяет определенный переменной типа Servo сервопривод от выхода.
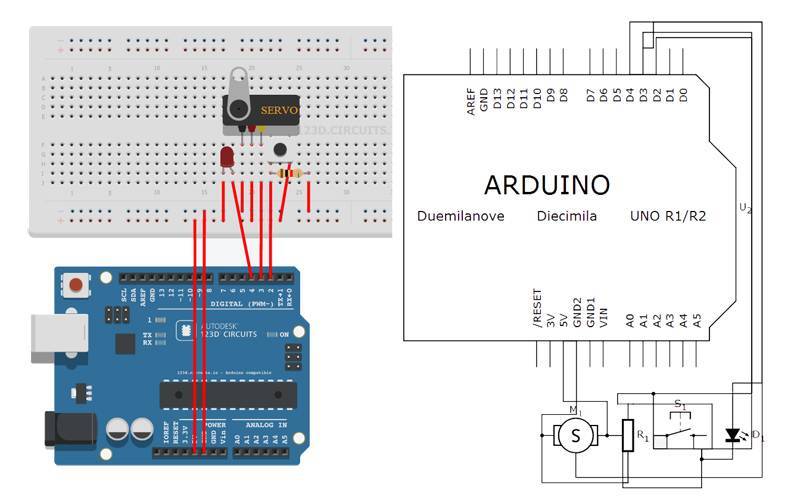
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.

Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://svetledlent.ru/wp-content/uploads/f/8/f/f8f1683ddd70b667b14544043456341d.jpeg)
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения
При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include Servo myservo; void setup(){ myservo.attach(9); myservo.write(90); } void loop(){ }
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.