Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» – он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Определение по таблицам
Как узнать мощность электродвигателя по диаметру вала и другим показателям? В интернете нетрудно найти технические таблицы, с помощью которых можно узнать тип мотора и, соответственно, его мощность. Вам потребуется снять следующие параметры:
- диаметр вала;
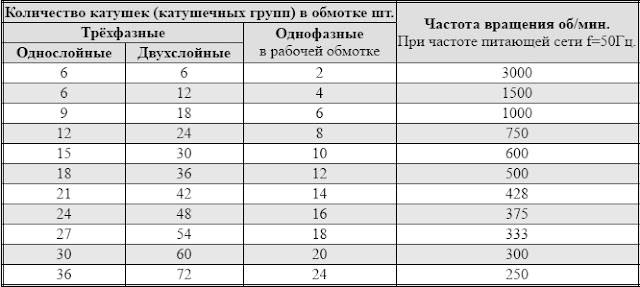
- частота его вращения или число полюсов;
- крепежные размеры;
- диаметр фланца (если двигатель фланцевый);
- высота до центра вала;
- длина мотора (без выступающей части вала);
- расстояние до оси.
Далее – вопрос времени и внимательности. Согласитесь, надежнее измерить детали и узнать точный, без погрешностей результат. В сети есть параметры абсолютно всех, даже очень старых моторов.
Вычисление по количеству оборотов в минуту
Определите визуально количество обмоток статора. Используйте тестер или миллиамперметр для того чтобы узнать число полюсов – при этом не требуется разбирать мотор. Подключите прибор к одной из обмоток и равномерно вращайте вал. Количество отклонений стрелки – это число полюсов. Учтите, что частота вращения вала при данном методе вычисления несколько ниже полученного результата.
Определение по габаритам
Еще один способ – проведение замеров и вычислений. Многие из тех, кто интересуется, как узнать мощность трехфазного двигателя, предпочитают именно его. Вам понадобятся следующие данные:
Диаметр сердечника в сантиметрах (D). Он измеряется по внутренней части статора. Также необходима длина сердечника с учетом отверстий вентиляции.
Частота валового вращения (n) и частота сети (f).
Через них вычислите показатель полюсного деления. D умножьте на n и на число Пи – назовем это показание А. 120 умножьте на f – это В. Разделите А на В.
Как видите, чтобы подсчитать значение, достаточно вспомнить школьный курс математики.
Определение по мощности, выдаваемой двигателем
Здесь опять придется вооружиться калькулятором. Узнайте:
- число оборотов вала в секунду (А);
- показатель тяглового усилия мотора (В);
- радиус вала (С) – это можно сделать с помощью штангенциркуля.
Определение мощности электродвигателя в Вт осуществляется по следующей формуле: Ах6.28хВхС.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Определение мощности по габаритам
Итак, частоту вращения мы узнали, переходим к самой мощности. Для этого вам нужно измерить габаритные размеры движка.
Что сюда входит?
диаметр вала
его высота над лапами (высота оси вращения)
расстояние между лапами (длина, ширина)
Если у вас движок фланцевый, в этом случае необходимо сделать:
а также диаметр самих отверстий на фланце
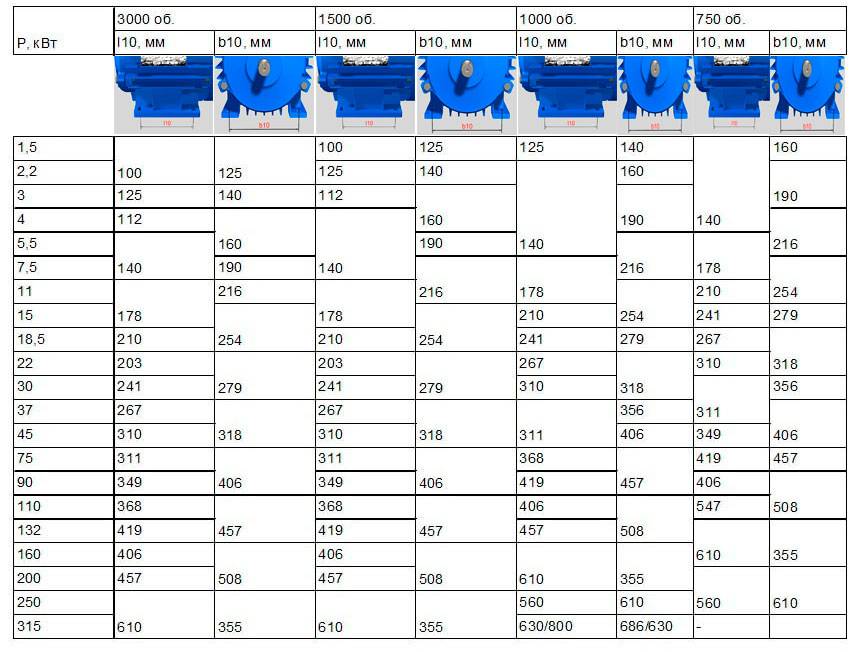
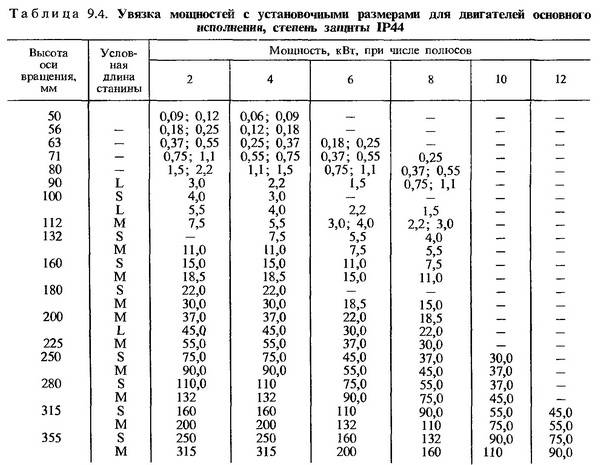
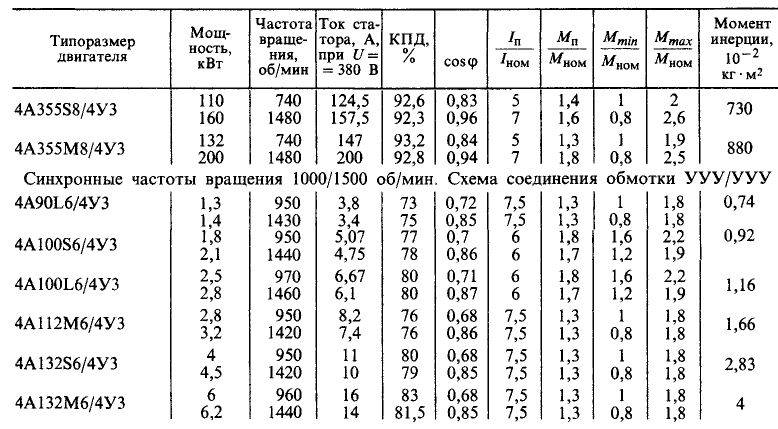
Для более точных замеров используйте штангенциркуль, а не линейку. Получив и записав результаты, переходим к заводским табличным данным. Вот эти параметры:
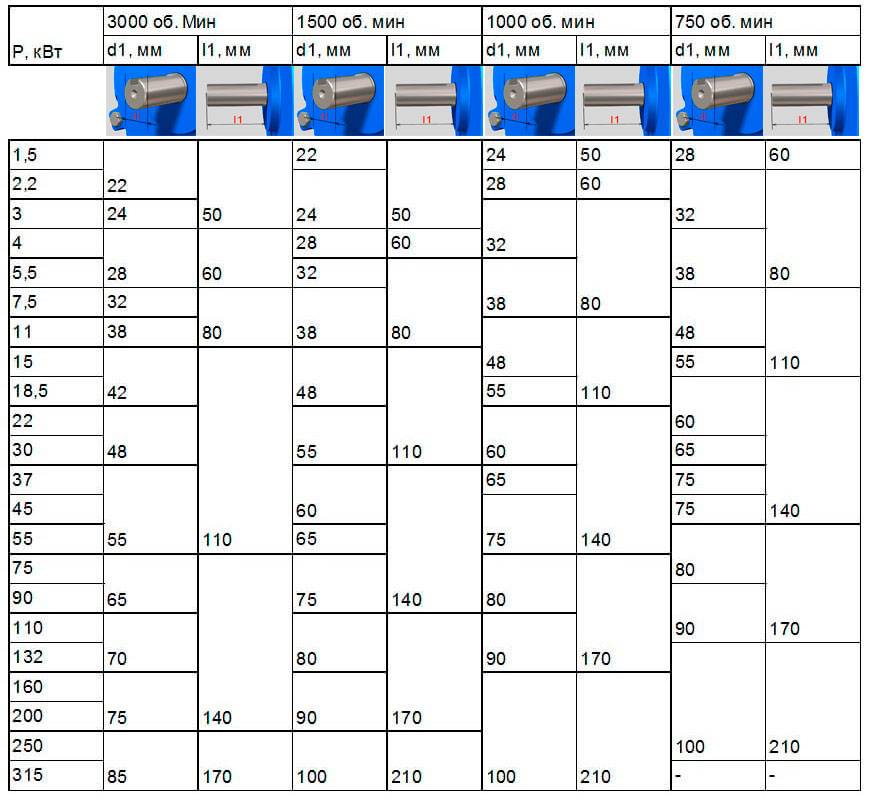
Таблица 1 – Определение мощности по валу двигателя
Таблица 2 – Определение мощности по расстоянию между лапами
Таблица 3 – Определение мощности по диаметру фланца

Сравнив полученные цифры с табличными данными, вы без какого-либо подключения к эл.сети узнаете мощность вашего движка.
Способы определения мощности электродвигателя
Подключайте двигатель только к тому источнику тока, напряжение которого вы точно знаете. Теперь подключите к цепи обмотки амперметра, но не все сразу, а по отдельности. Это даст вам возможность узнать, каких значений достигает рабочий ток. Затем просуммируйте все те показатели, которые вы получили.
Число, которое у вас получилось, необходимо умножить на предельное напряжение в сети. Полученный результат и станет значением той мощности, которую будет потреблять двигатель.
Можно найти этот показатель и другим способом. Вычислите скорость вращения вала устройства, пользуясь при этом тахометром. После этого возьмите динамометр, чтобы найти тяговое усилие электродвигателя. Чтобы получить окончательный результат, стоит умножить число 6,28 на частоту вращения, а также на радиус вала.
Последний показатель можно получить, измерив соответственный элемент линейкой. Теперь вы знаете, какая мощность понадобится для эффективной работы двигателя.
С измерением мощности вы уже успели разобраться. Но какие же плюсы и минусы есть у данных устройств?
Достоинства электродвигателей:
- КПД достигает 95%, что позволяет пользоваться данным оборудованием во всех отраслях промышленности;
- процесс работы полностью исключает потери на трение трансмиссии;
- начало запуска электродвигателя подразумевает под собой достижение максимального крутящего момента, поэтому пользоваться коробкой передач не придется;
- вам не придется тратить много денег на ремонт и обслуживание устройства;
- электродвигатель не выбрасывает в окружающую среду вредные компоненты;
- конструкция механизмов упрощена;
- электродвигатель самостоятельно осуществляет процесс торможения.
Недостатки устройств:
- емкость аккумулятора автономных электродвигателей ограничена, поэтому они не могут работать слишком долго;
- катушки устройства нагреваются, что приводит к значительным потерям энергии;
- вам придется потратить деньги на покупку аккумуляторов;
- подзаряжается батарея довольно долго, поэтому вы потеряете немало времени.
Это основные моменты, которые касаются современных электродвигателей. Если вы сделаете выбор в пользу такого устройства, то процесс работы будет идти гораздо быстрее и эффективнее.



Если техническая документация к двигателю утеряна, а надписи на корпусе стерлись или не читаемы, возникает вопрос: как определить мощность электродвигателя без бирки? Существуют несколько методов, о которых мы вам расскажем, и вам останется выбрать из них наиболее удобный в вашем случае.
Определение мощности по габаритам
Итак, частоту вращения мы узнали, переходим к самой мощности. Для этого вам нужно измерить габаритные размеры движка.
Что сюда входит?
диаметр вала
его высота над лапами (высота оси вращения)
расстояние между лапами (длина, ширина)
Если у вас движок фланцевый, в этом случае необходимо сделать:

а также диаметр самих отверстий на фланце
Для более точных замеров используйте штангенциркуль, а не линейку. Получив и записав результаты, переходим к заводским табличным данным. Вот эти параметры:
Таблица 1 – Определение мощности по валу двигателя
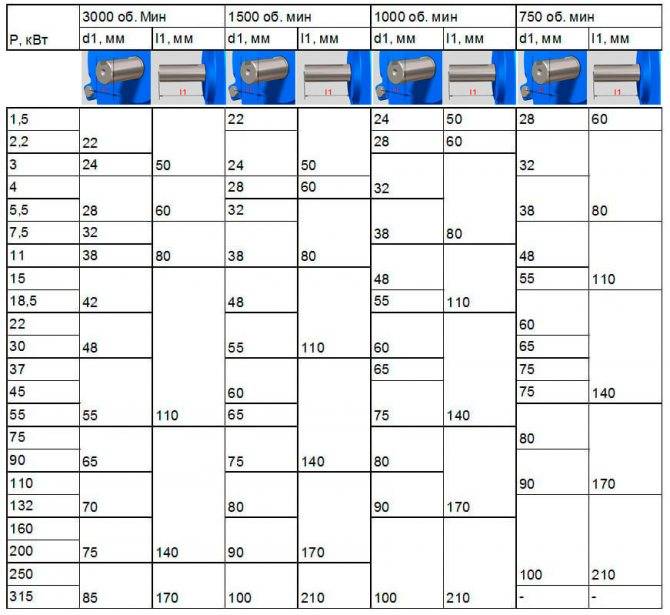
Таблица 2 – Определение мощности по расстоянию между лапами
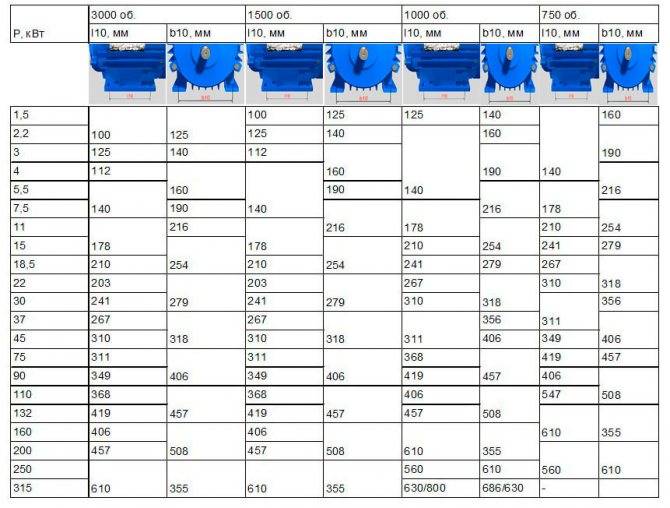
Таблица 3 – Определение мощности по диаметру фланца

Сравнив полученные цифры с табличными данными, вы без какого-либо подключения к эл.сети узнаете мощность вашего движка.
Единицы измерения
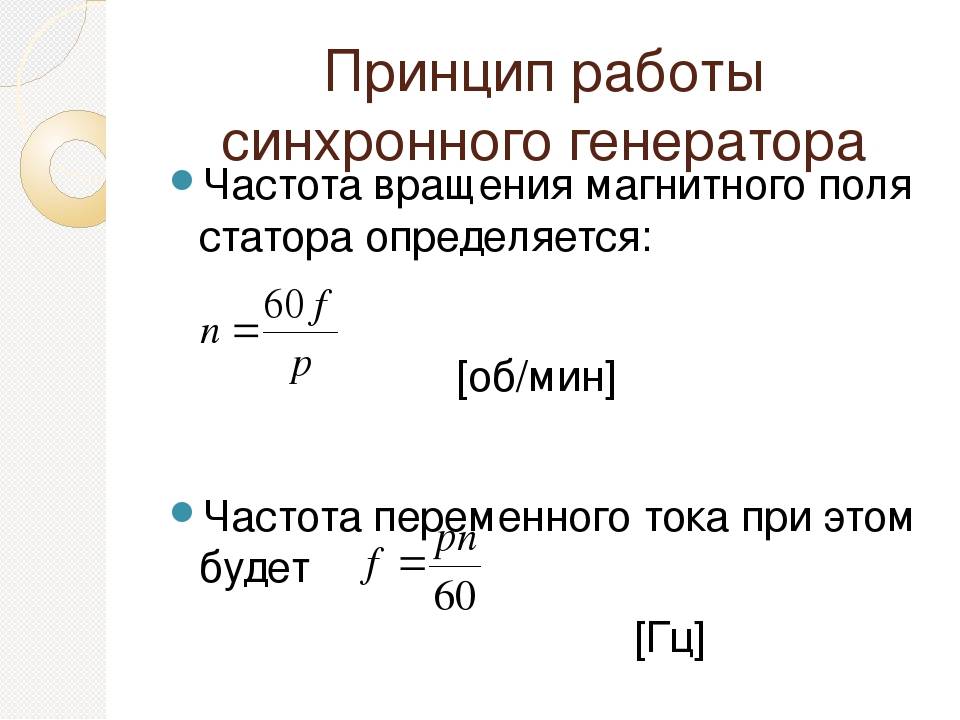
Мощность электродвигателя: формула, правила расчета, виды и классификация электродвигателей
В Международной системе единиц (СИ) единицей измерения мощности является ватт (Вт), равный одному джоулю в секунду (Дж/с). В теоретической физике, астрофизике, в качестве единицы для мощности часто используют эрг в секунду (эрг/с).
Другой распространённой, но ныне устаревшей единицей измерения мощности, является лошадиная сила. В своих рекомендациях Международная организация законодательной метрологии (МОЗМ) относит лошадиную силу к числу единиц измерения, «которые должны быть изъяты из обращения как можно скорее там, где они используются в настоящее время, и которые не должны вводиться, если они не используются». Соотношения между единицами мощности
| Единицы | Вт | кВт | МВт | кгс·м/с | эрг/с | л. с.(мет.) | л. с.(анг.) |
| 1 ватт | 1 | 10−3 | 10−6 | 0,102 | 107 | 1,36·10−3 | 1,34·10−3 |
| 1 киловатт | 103 | 1 | 10−3 | 102 | 1010 | 1,36 | 1,34 |
| 1 мегаватт | 106 | 103 | 1 | 102·103 | 1013 | 1,36·103 | 1,34·103 |
| 1 килограмм-сила-метр в секунду | 9,81 | 9,81·10−3 | 9,81·10−6 | 1 | 9,81·107 | 1,33·10−2 | 1,31·10−2 |
| 1 эрг в секунду | 10−7 | 10−10 | 10−13 | 1,02·10−8 | 1 | 1,36·10−10 | 1,34·10−10 |
| 1 лошадиная сила (метрическая) | 735,5 | 735,5·10−3 | 735,5·10−6 | 75 | 7,355·109 | 1 | 0,9863 |
| 1 лошадиная сила (английская) | 745,7 | 745,7·10−3 | 745,7·10−6 | 76,04 | 7,457·109 | 1,014 | 1 |
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила – любая сила – вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
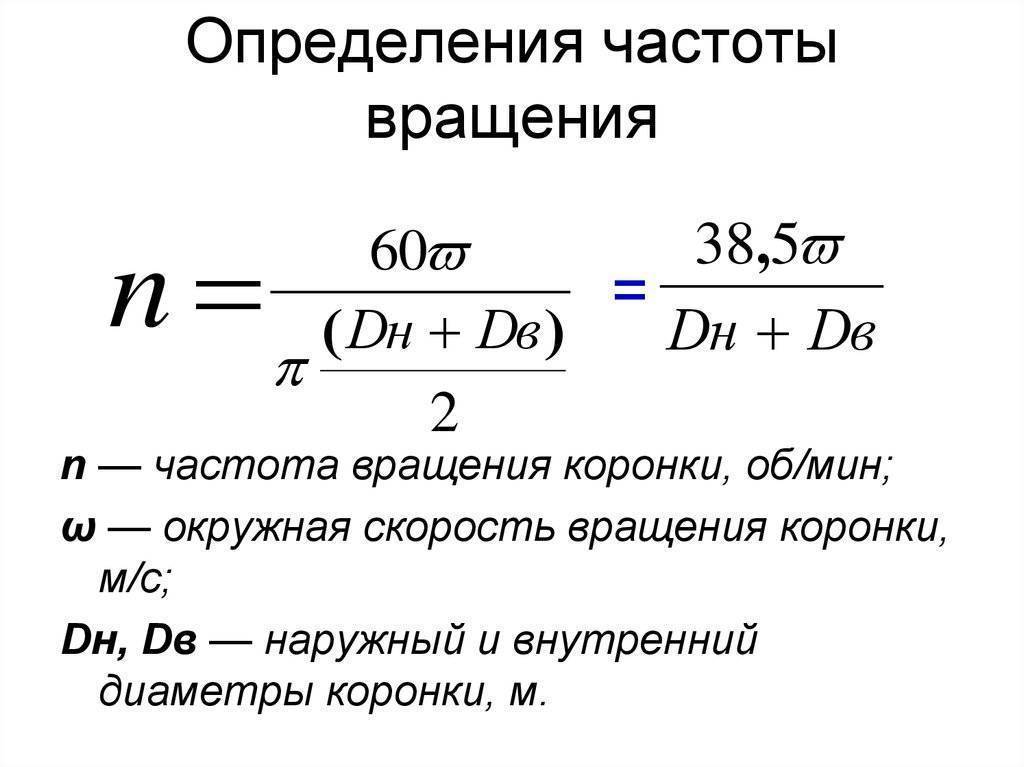
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
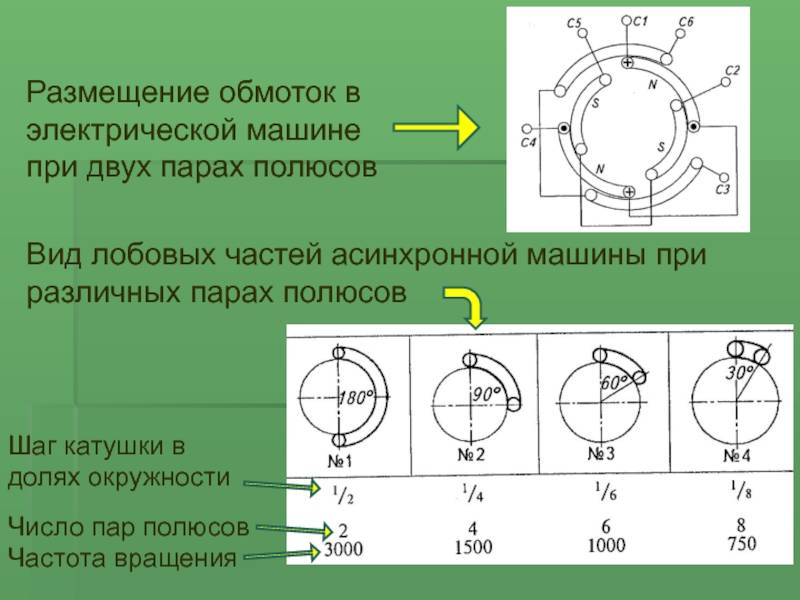
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
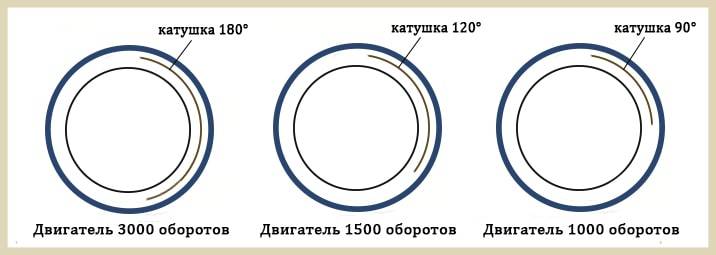
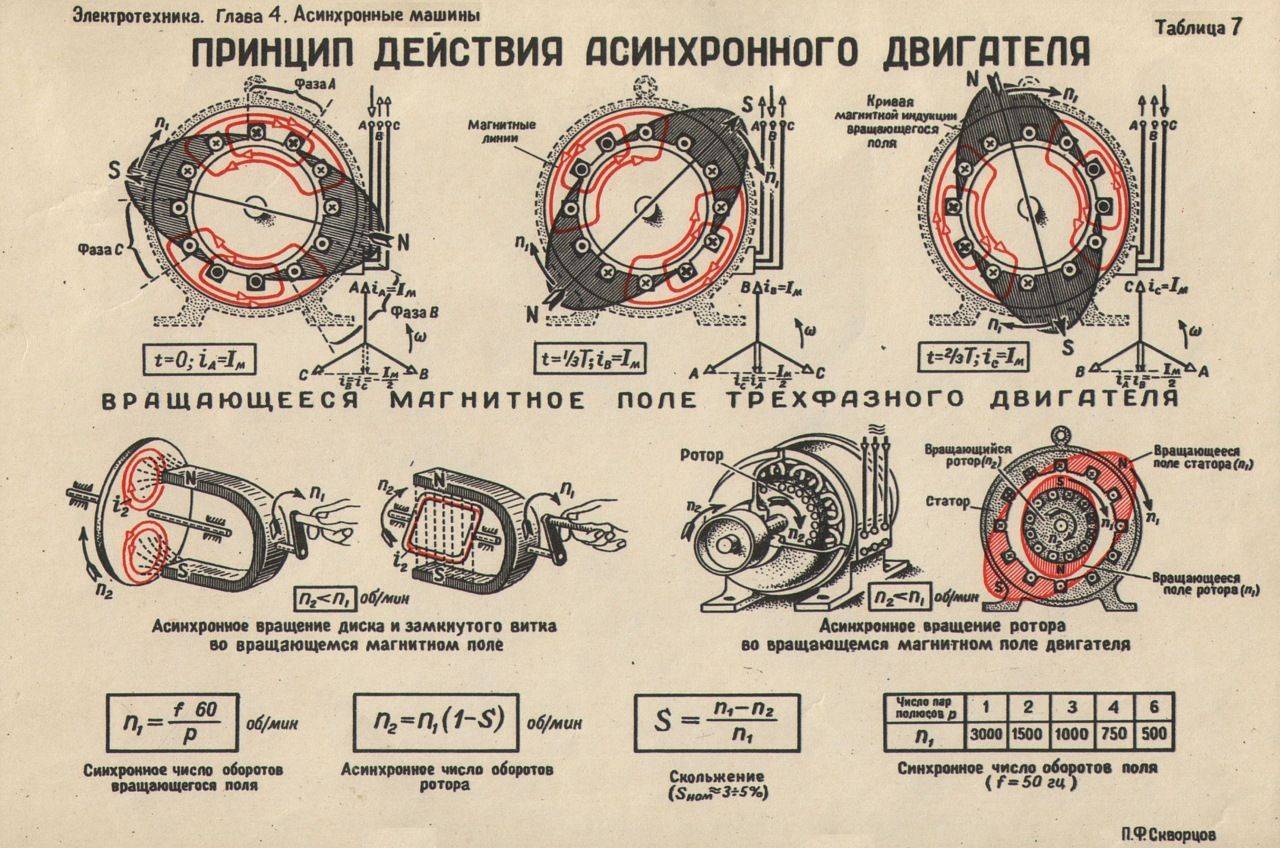
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
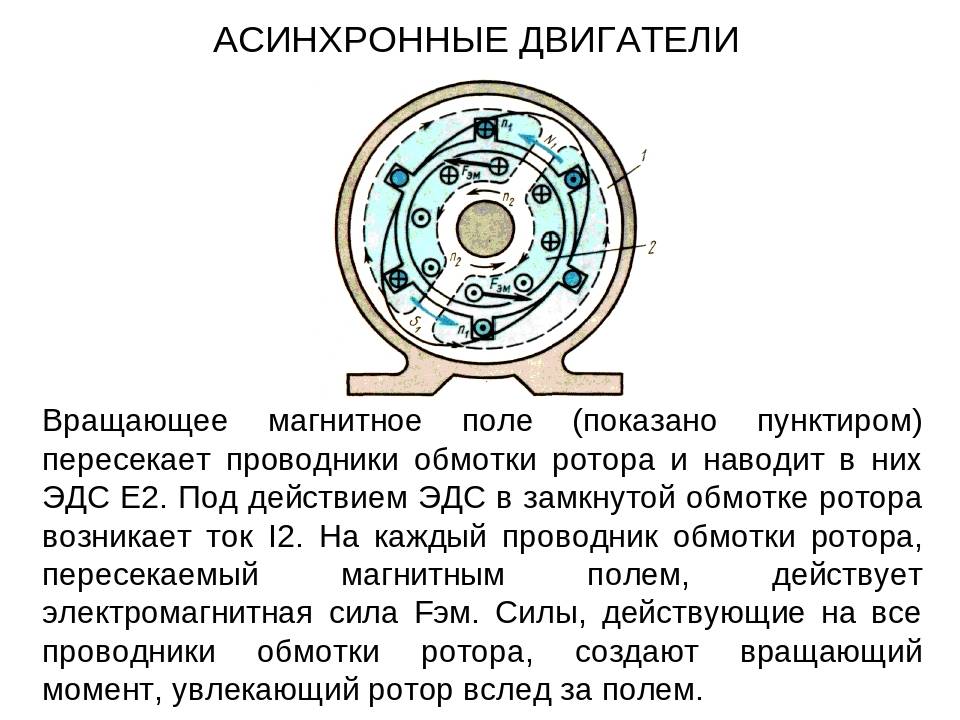
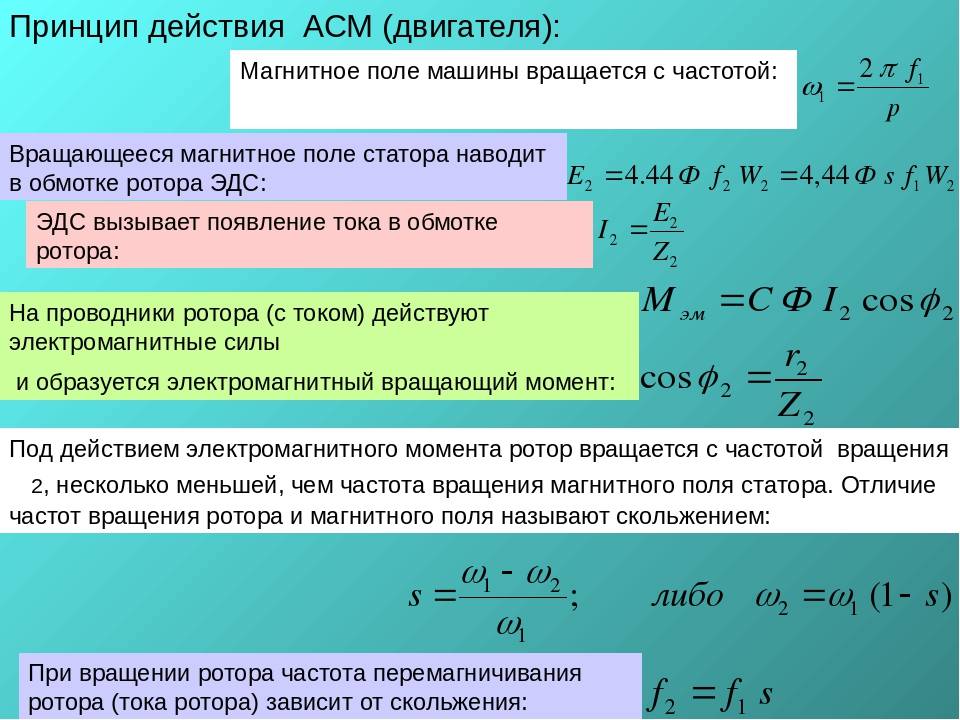
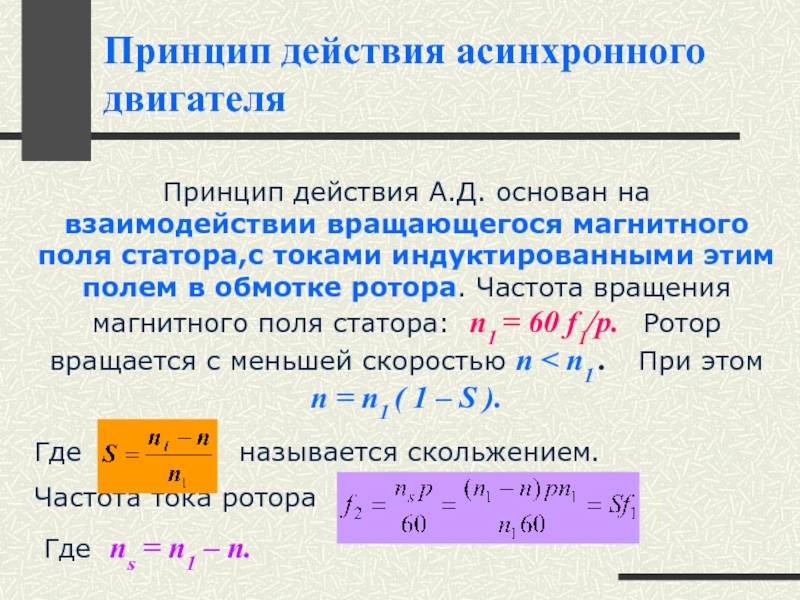
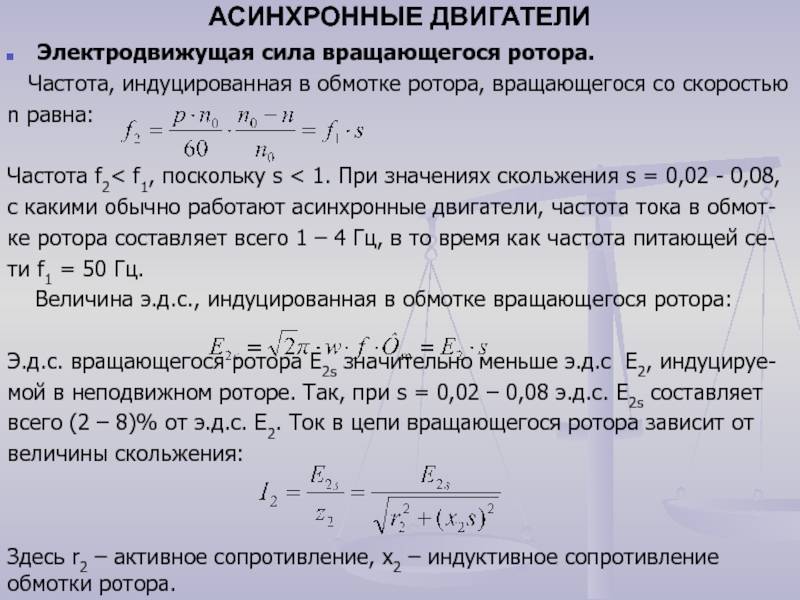
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
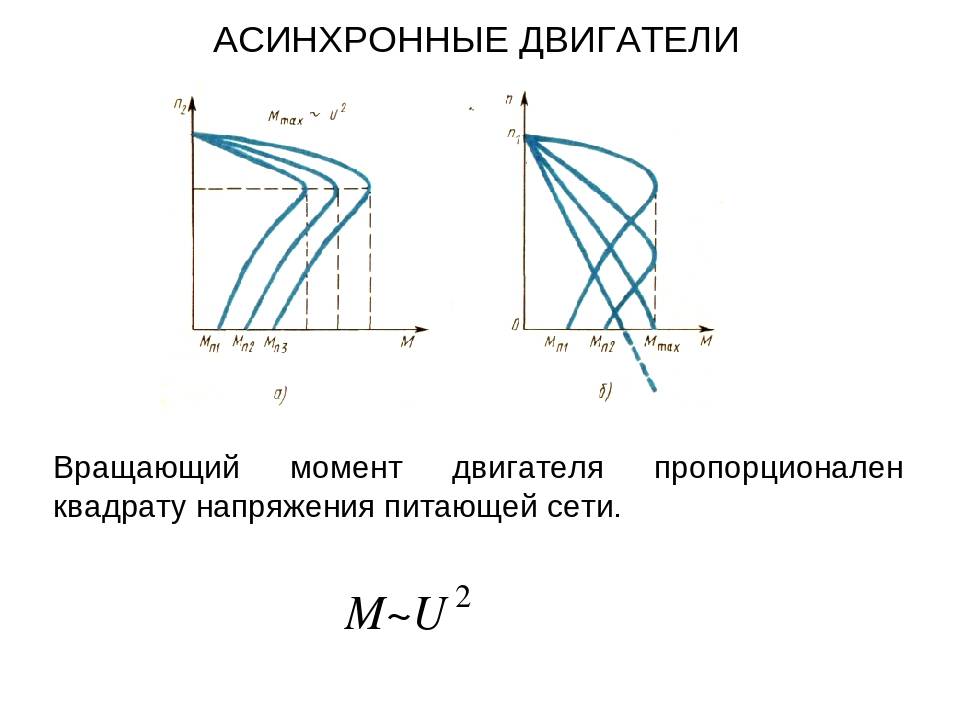
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Рекомендации по установке направленных шин
Самостоятельная смена автопокрышек для опытных автолюбителей не вызывает особых затруднений. Если же за подобной услугой обращаются в шиномонтажную мастерскую, нужно обязательно лично проверять правильность установки резины после окончания работ.
Следует помнить, если производилась перебортовка покрышек, обязательна балансировка колес на специальном станке. Это необходимо для исключения их биения при движении, особенно на больших скоростях.
После монтажа колес важно проверить давление в шинах и довести его до нужного значения. От этого зависит эффективная работа направленных покрышек на дороге
Как определить направление протектора на шинах – вопрос, возникающий при использовании покрышек почти всех современных производителей. От этого напрямую зависит безопасность водителя, пассажиров, а также других участников дорожного движения.

Современные шины обладают определенным видом рисунка протектора. Этот рисунок бывает: ненаправленный, направленный и ассиметричный. Благодаря этому разнообразию порой можно попасть в неприятную ситуацию, когда автомобиль по непонятным причинам начинает вести вправо или влево, при этом сход-развал настроен правильно. В данной ситуации, скорее всего, во время очередной «переобувки» с лета на зиму или с зимы на лето, колесо было установлено неправильно. Как определить направление вращение шины, дабы избежать подобных ситуаций? Ответ найдете в данной статье.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.

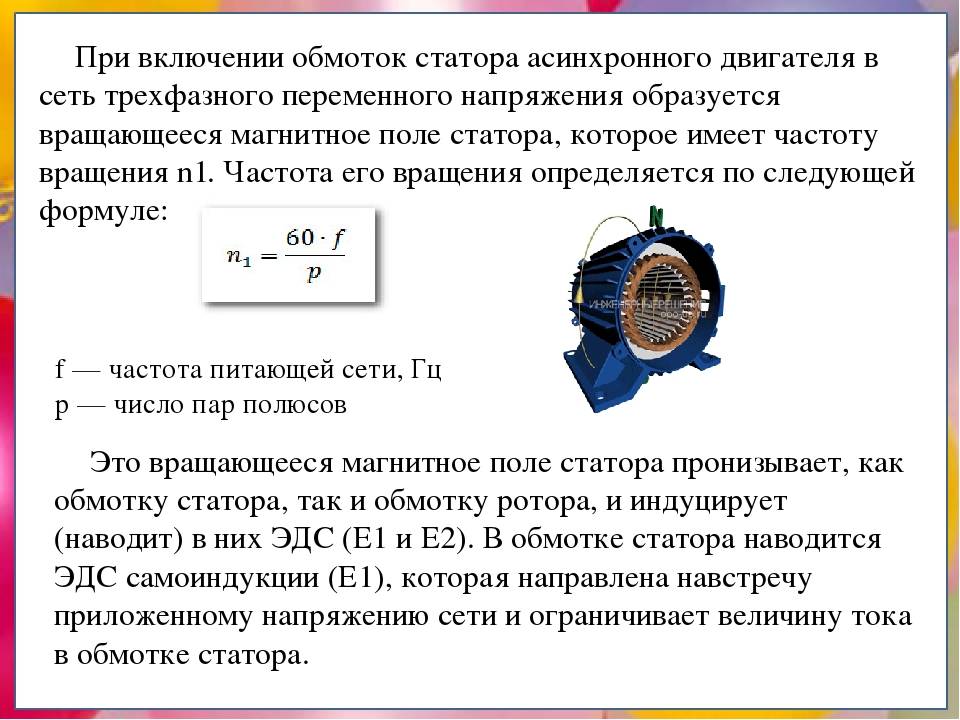
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P – мощность, U – напряжение, I – сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
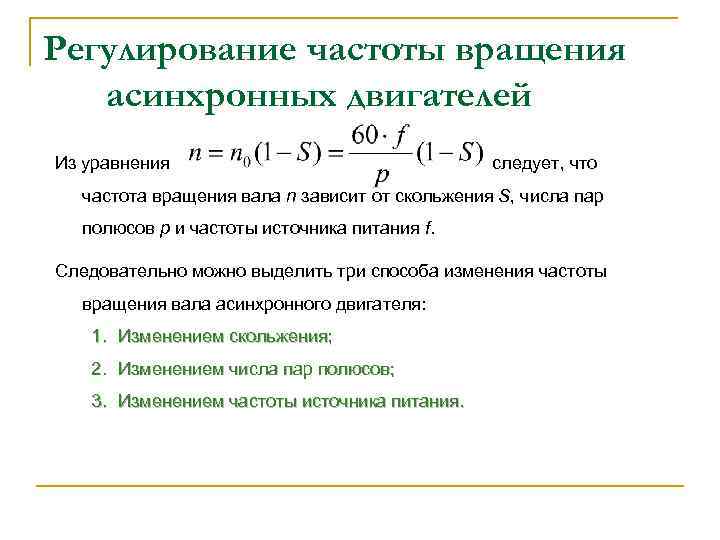
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n пропорциональна напряжению, а от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в
). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Советуем изучить — Задачи диагностических работ при эксплуатации электрооборудования
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г
и двигателяД используется возбудительВ — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6,б )известна под названием системы «генератор — двигатель»(Г—Д) .
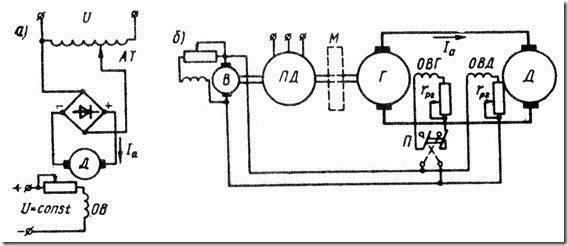
Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г
—Д, осуществляется изменением направления тока в цепи возбуждения генератораГ переключателемП, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховикМ, который запасает энергию в период уменьшения нагрузки на двигательД и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
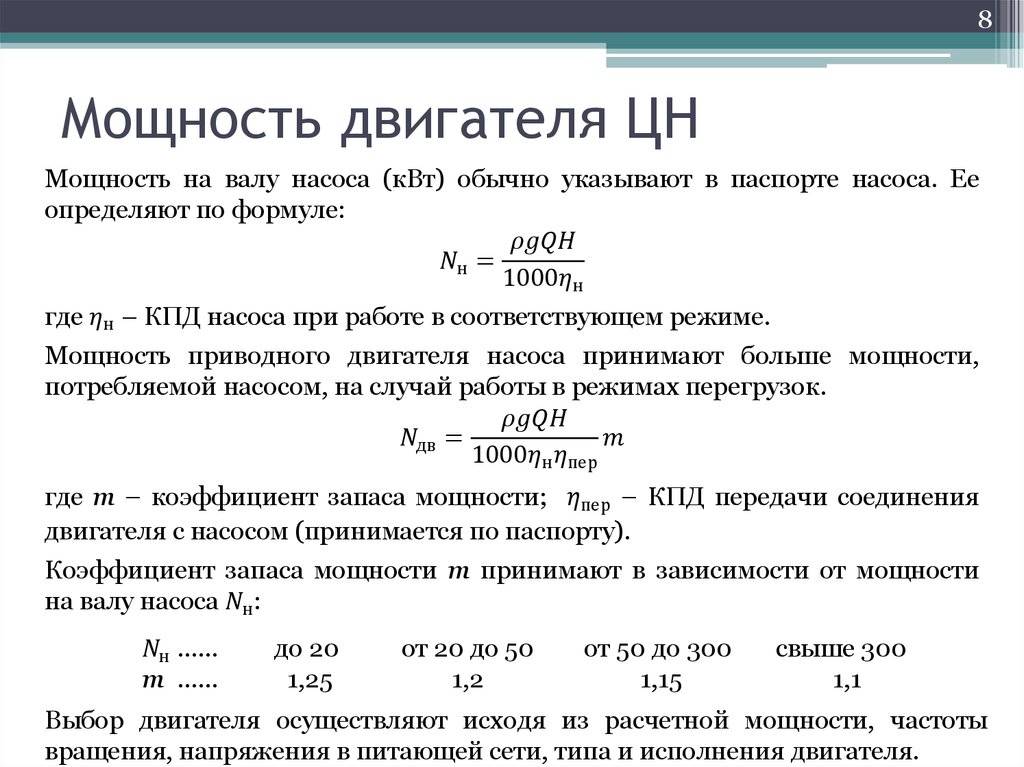
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия – «постоянный вращающий момент» – подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» – эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения – мал, а потребный вращающий момент при высокой частоте вращения – велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность – кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Расчет мощности 3-фазного асинхронного агрегата
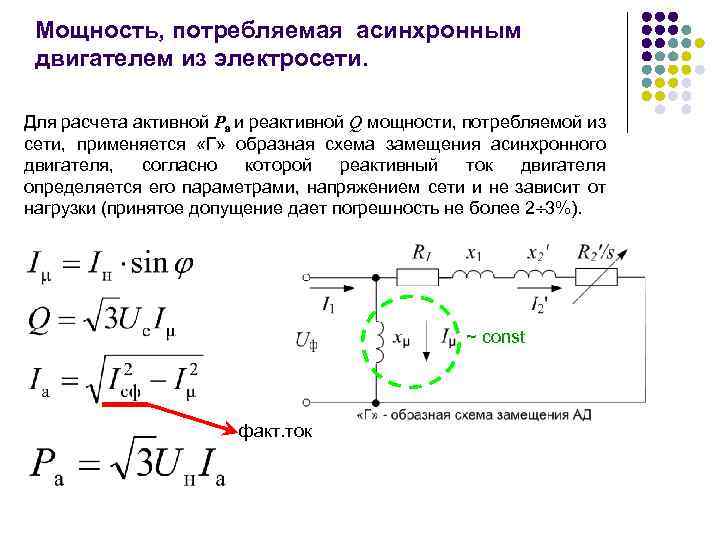
Чтобы рассчитать полезную мощность на обмотке статора асинхронного 3-фазного двигателя, следует умножить фазное напряжение на фазный ток и на коэффициент мощности, а полученное значение мощности умножить на три (по количеству фаз):
Pстатора = 3 * Uф * Iф * cosφ.
Вам будет интересно:“Неожиданный” – это какой? Значение слова
Расчет мощности эл. двигателя, имеющей активный характер, то есть мощности, которая снимается с вала двигателя, производится так:
Pвыходная = Pстатора – Pпотерь.
В асинхронном двигателе имеют место следующие потери:
- электрические в обмотке статора;
- в стали сердечника статора;
- электрические в обмотке ротора;
- механические;
- добавочные.
Для расчета мощности трехфазного двигателя в обмотке статора, имеющей реактивный характер, необходимо сложить три составляющие данного типа мощности, а именно:
- реактивную мощность, расходуемую на создание потока рассеяния обмотки статора;
- реактивную мощность, расходуемую на создание потока рассеяния обмотки ротора;
- реактивную мощность, расходуемую на создание основного потока.
Реактивная мощность в асинхронном двигателе в основном расходуется на создание переменного электромагнитного поля, но часть мощности расходуется на создание потоков рассеяния. Потоки рассеяния ослабляют основной магнитный поток и снижают эффективность работы асинхронного агрегата.